Robot kebşirleýiş enjamlary, awtomatiki kebşirleýiş prosesinde metal iş böleklerini ygtybarly saklamak üçin döredilen ýöriteleşdirilen gysgyç we ýerleşdiriş ulgamlarydyr. 2026-njy ýyla ýakynlaşanymyzda, bu gurallar ýönekeý mehaniki eýelerden ýokary göwrümli önümçilik üçin gaýtalanýan takyklygy üpjün edýän akylly, sensor integrirlenen platformalara öwrüldi. Sag saýlamak robot kebşirleýiş enjamlary sikl wagtyny azaltmak, gaýtadan işlemegi azaltmak we robot öýjükleri üçin maýa goýumlaryny köpeltmek üçin möhümdir.
2026-njy ýyla çenli robot kebşirleýiş enjamlarynyň ewolýusiýasy
Senagat awtomatizasiýasynyň peýza .y çalt üýtgeýär. 2026-njy ýyla çenli önümçilik liniýalarynda çeýelige bolan isleg, armatura nähili çemeleşýändigimizi düýpgöter täzeden düzmäge mejbur etdi. Adaty gaty gural, köpçülikleýin önümçilik üçin ygtybarly bolsa-da, häzirki zaman garyşyk model gurnama liniýalary üçin zerur uýgunlaşma ýetmezçiligi bolýar.
Häzirki tendensiýa tarap bir hereketi görkezýär modully gurnama ulgamlary. Bular öndürijilere giňişleýin iş wagty bolmazdan sazlamalary çalt düzmäge mümkinçilik berýär. Sanly ekizleriň we simulýasiýa programma üpjünçiliginiň birleşmegi indi inersenerlere fiziki ýasama başlamazdan armatura dizaýnlaryny barlamaga mümkinçilik berýär. Bu geçişde öňdebaryjy hünärmenler ýaly Botou Haijun Metal Products Co., Ltd.gözleg we gözleg işlerini ýokary takyk çeýe modully enjamlary öndürmäge bagyşlady. Olaryň ösen 2D we 3D çeýe kebşirleýiş platformalary, köpugurly, täsirli ýerleşiş çözgütlerine geçişini görkezip, gaýtadan işleýän, awtoulag we howa giňişliginde ileri tutulýan enjamlara öwrüldi.
Mundan başga-da, bilelikdäki robotlaryň (kobotlar) köpelmegi, enjamlar üçin täze howpsuzlyk we ergonomiki talaplary girizdi. Adaty gaplanan öýjüklerden tapawutlylykda, kobot programmalary robot üçin berk pozisiýa takyklygyny saklamak bilen, adam operatorlary tarapyndan aňsat ýüklenmegi we düşürilmegini aňsatlaşdyrýan enjamlary talap edýär.
Gurluşyň dizaýnyny üýtgedýän esasy sürüjiler
Häzirki bazardaky kebşirleýiş enjamlarynyň dizaýnyna we satyn alynmagyna birnäçe faktor täsir edýär:
- Mixokary garyşyk pes göwrümli önümçilik: Öndürijiler çalt üýtgemeler bilen köp bölek üýtgemelerini dolandyryp bilýän gurallara mätäç.
- Çydamlylyk talaplary: Ösen ýokary güýçli polatlar we alýumin erginleri, kebşirleýiş wagtynda sarsmazlygyň öňüni almak üçin has berk gysyş çydamlylygyny talap edýär.
- Maglumatlaryň integrasiýasy: Döwrebap enjamlar bölekleýin barlygyny we gysgyç ýagdaýyny barlamak üçin datçikleri öz içine alýar, maglumatlary gönüden-göni robot gözegçisine berýär.
- Çykdajylaryň netijeliligi: Çydamly materiallar we standartlaşdyrylan komponentler arkaly eýeçiligiň umumy bahasyny azaltmaga aýratyn üns berilýär.
Robot kebşirleýiş enjamlarynyň görnüşleri 2026-njy ýylda bar
Gerekli armatura görnüşine düşünmek, kebşirleýiş öýjügiňizi optimizirlemekde ilkinji ädimdir. Häzirki wagtda bazar dürli önümçilik zerurlyklaryna hyzmat edýän birnäçe aýratyn kategoriýany hödürleýär.
Bagyşlanan gaty gural
Bagyşlanan gurallar bir bölek belgisi ýa-da bölekleriň aýratyn maşgalasy üçin ýörite gurlupdyr. Iň ýokary gaýtalanma we tizlik hödürleýär. 2026-njy ýylda awtoulag OEM-leri we uzak önümçilik siklini işleýän agyr enjam öndürijiler üçin standart bolup galýar.
Bu enjamlarda adatça gaty polat lokatorlary we pnewmatik ýa-da gidrawliki gysgyçlar bar. Başlangyç in engineeringenerçilik we önümçilik çykdajylary ýokary bolsa-da, birligiň bahasy uly göwrümden ep-esli azalýar. Şeýle-de bolsa, olaryň çeýeligi ýok; önümdäki islendik dizaýn üýtgemesi, köplenç armatura köne bolýar.
Modully we çeýe armatura
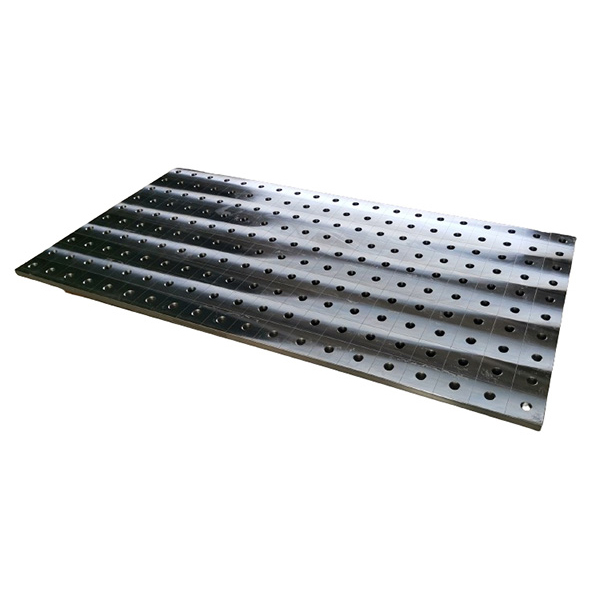
Modul ulgamlary takyk deşikleri we gysgyçlar, duralgalar we gysgyçlar ýaly standartlaşdyrylan komponentleri ulanýar. Bu çemeleşme, ulanyjylara önüm dizaýnlarynyň üýtgemegi bilen enjamlary gurmaga, sökmäge we täzeden gurmaga mümkinçilik berýär. Iş dükanlary we şertnama öndürijiler üçin bu köplenç iň tygşytly çözgüt.
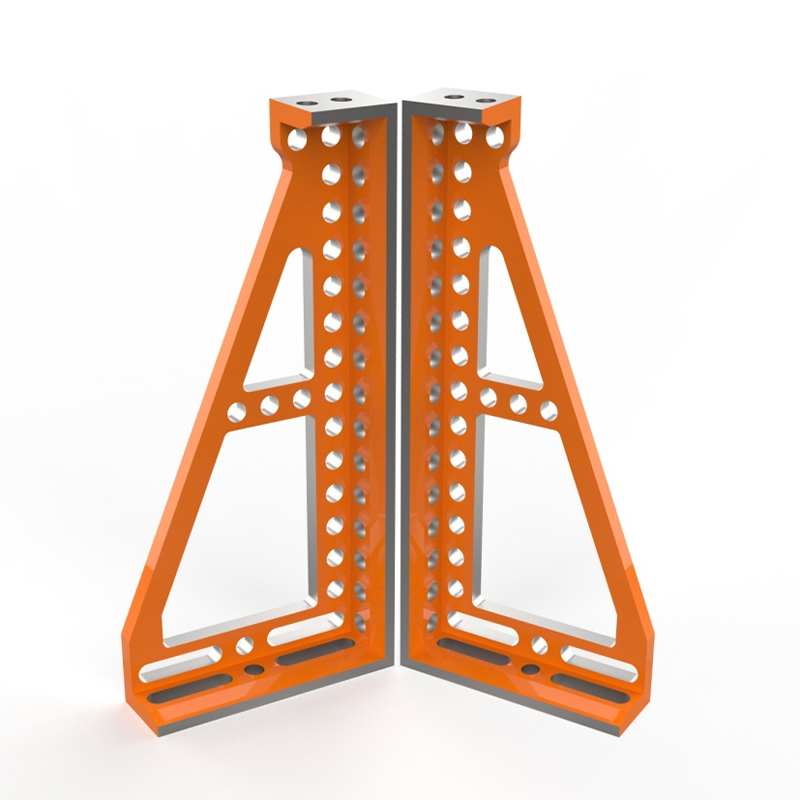
Iň soňky modul ulgamlarynda çalt sazlamak we gurnama wagtyny birnäçe minutdan azaldýan çalt çykarylýan mehanizmler üçin lazer bilen örtülen gözenekler bar. Botou Haijun metal önümleri ýaly kompaniýalar goşmaça komponentleriň giňişleýin ekosistemalaryny hödürläp, bu kategoriýany giňeltdiler. Olaryň aralygy U görnüşli we L görnüşli köp maksatly kwadrat gutular, 200 seriýaly goldaw burç ütükleri we 0-225 ° uniwersal burç ölçegleri bar. Bu esbaplar çeýe platformalar bilen yzygiderli birleşýär we 2026-njy ýylda giňden ýaýran “çeýe önümçilik” modelini goldaýar, önümçilik liniýalary hepdede ýa-da her gün uýgunlaşmaly.
Gibrid akylly enjamlar
Bazaryň ösýän segmenti gibrid akylly gural. Bular gaty gurallaryň berkligini Senagat 4.0 akyl bilen birleşdirýär. Olara robot kebşirleme ýaýyny başlamazdan ozal bir böleginiň dogry oturandygyny anyklaýan içerki datçikler bar.
Eger gyşarma ýüze çykarylsa, ulgam robot ýoluny düzetmek arkaly awtomatiki öwezini dolup biler ýa-da döwülmeginiň öňüni almak üçin aýlawy saklap biler. Bu tehnologiýa hil gözegçiliginiň çykdajylaryny ep-esli azaldar we kebşirlemegiň yzygiderli aralaşmagyny üpjün edýär. Şeýle ýokary öndürijilikli talaplary goldamak üçin üpjün edijiler hünärli çoýun 3D kebşirleme platformalaryny we burç birikdiriji bloklary hem öndürýärler, her önümiň berk senagat şertlerinde ajaýyp berkligi we durnuklylygy üpjün edýär.
Robot kebşirleýiş enjamlarynyň nyrh meýilleri we çykdajy faktorlary
2026-njy ýylda robot kebşirleýiş enjamlarynyň bahasyny kesgitlemek birnäçe üýtgeýjini derňemegi talap edýär. Çig mal çykdajylary, esasanam polat we alýumin, şeýle hem integrirlenen elektronikanyň çylşyrymlylygy sebäpli bahalar üýtgäpdir.
Adatça, esasy el bilen modully armatura aşaky müňlerçe dollardan başlap biler, sero ýerleşişi we görüş integrasiýasy bilen doly awtomatlaşdyrylan, köp stansiýaly aýlaw stoly alty sandan ýokary bolup biler. Bahasy diňe metal hakda; dizaýna ornaşdyrylan in engineeringener intellekti hakda.
Çykdajy komponentleriniň bölünişi
Býudjetiňiziň nirä gidýändigine düşünmek üçin şu esasy çykdajy sürüjilerine serediň:
- Dizaýn we in Engineeringenerçilik: Cörite CAD modellemek we simulýasiýa hyzmatlary köplenç taslamanyň umumy bahasynyň 20-30% -ini düzýär.
- Esasy gurluş: Kebşirlenen polat turba, çoýun ýa-da alýuminiý ekstruziýanyň arasyndaky baha, hem agramyna täsir edýär.
- Basyş mehanizmleri: El bilen üýtgetmek gysgyçlary arzan, güýçli seslenme bilen sero-elektrik gysgyçlar premium elementlerdir.
- Hereket ulgamlary: Pnewmatiki ulgamlar adaty, ýöne gidrawliki ýa-da elektrik servo hereketlendirijileri has ýokary güýç ýa-da takyk ýerleşiş zerurlyklary üçin çykdajylary ýokarlandyrýar.
- Sensor we birikme: Imakynlyk datçiklerini, bölek kesgitlemek üçin RFID belliklerini we IoT şlýuzalaryny goşmak, öňdäki maýa goýumlaryny goşýar, ýöne uzak möhletleýin iş töwekgelçiligini peseldýär.
Armatura görnüşi boýunça bahalary deňeşdirmek
Aşakdaky tablisada 2026-njy ýylda garaşylýan nyrh derejelerine umumy syn berilýär. Bularyň sebitlere, üpjün edijilere we aýratyn özleşdirmelere görä bahalandyrylýandygyny we üýtgeýändigini ýadyňyzdan çykarmaň.
| Gurluşyň görnüşi | Takmynan baha aralygy (USD) | Iň oňat ulanylyş meselesi | Gurşun wagty |
| El bilen modul toplumy | 2000 $ - 8,000 $ | Prototip ýazmak, pes ses, gözleg we barlag | 1-2 hepde |
| Autarym awtomatlaşdyrylan | 10,000 $ - 25,000 $ | Orta göwrüm, ýeke bölek maşgala | 4-6 hepde |
| Doly awtomatlaşdyrylan gaty gural | 30,000 $ - 75,000 $ | Volokary göwrümli, awtoulag, agyr senagat | 8-12 hepde |
| Servo bilen akylly çeýe öýjük | $ 80,000 + | Garyşyk model ýokary takyklyk çyzyklary | 12-16 hepde |
Robot kebşirlemek üçin möhüm dizaýn pikirleri
Robot üçin armatura dizaýny, adam kebşirleýjisi üçin dizaýn etmekden düýpgöter tapawutlanýar. Robotlar kör takyklyk bilen işleýärler; bölegi programmanyň garaşýan ýerinde däl bolsa, netijede ýykylan fakel ýa-da kemçilikli kebşir.
Elýeterlilik we fakeli arassalamak
Iň ýaýran dizaýn kemçiligi, kebşirleýiş fakeli üçin arassalamak ýeterlik däl. In Engineenerler, ýaragyň armatura bilen çaknyşmazdan her bir boguna ýetip biljekdigini üpjün etmek üçin bilegiň oklaryny goşmak bilen robotyň hereketiniň ähli görnüşini simulirlemeli.
Esasy düzgün: Elmydama kebşirleýiş zonasyndan açylýan ýa-da pes derejeli gysgyç mehanizmlerini ulanýan gysgyçlary dizaýn ediň. Spaceer gaty dar bolsa, gozli fakelleri ulanmagy göz öňünde tutuň, ýöne tebigy ýagdaýda girmäge mümkinçilik berýän armatura geometriýasyny ileri tutuň.
Bölek ýüklemek we ergonomika
Hatda awtomatlaşdyrylan öýjüklerde-de adamlar köplenç bölekleri ýükleýärler we düşürýärler. Gurluşy ulanmak kyn bolsa, operatorlar howpsuzlyga we hiline zyýan berýän gysga ýollary taparlar. Ergonomiki dizaýn ýörelgeleri, agyr bölekleriň bel beýikligine ýüklenmegini talap edýär.
2026-njy ýylda köp desga göteriji enjamlary gönüden-göni armatura stansiýasyna birleşdirýär. Mundan başga-da, asimmetrik lokatorlar ýaly poka-boýuntyryk (ýalňyşlygy tassyklaýan) aýratynlyklar bölekleriň yza ýa-da tersine ýüklenmeginiň öňüni alýar.
Malylylyk ýoýulmagyny dolandyrmak
Kebşirlemek metalyň giňelmegine we gysylmagyna sebäp bolup, güýçli ýylylyk döredýär. Bir bölegini gaty berk saklaýan berk armatura, stresiň ýarylmagyna sebäp bolup biler ýa-da boşadylandan soň böleginiň çişmegine sebäp bolup biler. Netijeli armatura dizaýny ýylylyk ösüşini düzýär.
Strategiýalar, beýlekileri çäklendirmek bilen bir okda giňelmäge mümkinçilik berýän süýşýän lokatorlary ulanmagy ýa-da ýylylygy çalt ýaýratmak üçin armatura korpusynyň içindäki sowadyjy kanallary ulanmagy öz içine alýar. Alýumin ýa-da inçe ölçegli poslamaýan polatdan kebşirlenende bu aýratyn möhümdir.
Dogry armatura çözgüdini saýlamak üçin ädimme-ädim gollanma
Dogry gurnama strategiýasyny saýlamak derňewiň logiki ösüşini öz içine alýar. Bu gurluşly çemeleşmä eýermek, önümçilik maksatlaryny artykmaç sarp etmän ýerine ýetirmegiňizi üpjün edýär.
1-nji ädim: Bölüm geometriýasyny we göwrümini derňäň
Kebşirlenjek bölekleriň CAD modellerini gözden geçirip başlaň. Kritiki maglumatlary we çydamlylyk zolaklaryny kesgitläň. Şol bir wagtyň özünde, ýyllyk göwrüm maksatlaryňyzy kesgitläň. Volumeokary göwrüm aýratyn gurallary esaslandyrýar, pes ses bolsa modullygy talap edýär.
2-nji ädim: Kebşirleýiş amalyny kesgitläň
MIG, TIG, Lazer ýa-da Spot kebşirleýändigini ulanýandygyňyzy kesgitläň. Her prosesiň dürli giriş talaplary we ýylylyk girişleri bar. Mysal üçin, lazer bilen kebşirlemek, adaty MIG kebşirleýişi bilen deňeşdirilende gaty berk armatura çydamlylygyny talap edýär.
3-nji ädim: Awtomatlaşdyryş derejesine baha beriň
Awtomatlaşdyrmagyň derejesini kesgitläň. Gurluş el bilen ýüklenermi? Bölekleýin awtomatiki kesgitlemek gerekmi? Kebşini aşaky elinde goýmak üçin armatura aýlanmalymy ýa-da egilmelimi? Has köp awtomatlaşdyryş çykdajylary ýokarlandyrýar, ýöne yzygiderliligi ýokarlandyrýar.
4-nji ädim: Simulýasiýa we tassyklama
Metaly kesmezden ozal, wirtual işe giriziş simulýasiýasyny işlediň. Robotyň ýetendigini barlaň, çaknyşyklary barlaň we sikl wagtlaryny çaklaň. Bu ädim gymmat bahaly gaýtadan işlemekden gaça durmak üçin häzirki zaman in engineeringenerçilik işlerinde gepleşik geçirip bolmaýar.
5-nji ädim: Üpjün edijini saýlamak we prototip ýazmak
Specificörite pudagyňyzda subut edilen tejribesi bolan satyjyny saýlaň. Salgylanmalary soraň we mümkin boldugyça gaty gural ýasamaga başlamazdan ozal düşünjäni barlamak üçin modully komponentleri ulanyp prototip guruň. Içerki we halkara müşderilere hyzmat etmekde köp ýyllyk tejribe toplan Botou Haijun Metal Products ýaly döredilen üpjün edijiler bilen gatnaşmak, ýokary hilli önümçilik enjamlary gurallary seriýasyna we ygtybarly tehniki goldawy üpjün edip biler.
Bazary emele getirýän iň ýokary çözgütler we tehnologiýalar
Robot kebşirleýiş enjamlary bazary has çylşyrymlaşýar. Birnäçe möhüm tehnologiýa, 2026-njy ýyla geçip baranymyzda bar bolan “iň ýokary çözgütleri” kesgitleýär.
Nol nokady gysmak ulgamlary
Nol nokadyň gysylmagy kiçi minutlyk üýtgeşmeleri amala aşyrmaga mümkinçilik berýär. Robot stolunda ýa-da pozisiýada standart kabul ediji plastinka ulanyp, ähli armatura modullaryny derrew çalşyp bolýar. Bu tehnologiýa bir setirde birnäçe SKU işleýän öndürijiler üçin zerurdyr.
Görüş bilen uýgunlaşdyrylan gurnama
3D görüş ulgamlaryny uýgunlaşdyrylan gurallar bilen birleşdirmek ýapyk görnüşli prosesi döredýär. Kamera çig bölegi gözden geçirýär, nominal modelden gyşarmalary kesgitleýär we armaturany ýerini üýtgetmek üçin lokatorlaryny ýa-da roboty sazlamagy tabşyrýar. Bu, ýokarky kesiş ýa-da emele getiriş prosesleriniň üýtgemeleriniň öwezini dolýar.
Lighteňil kompozit materiallar
Robot dinamikasyny gowulandyrmak we energiýa sarp edilişini azaltmak üçin has täze enjamlar ýokary güýçli kompozitleri we ösen alýumin erginlerini ulanýarlar. Bu materiallar takyklygy pida etmezden pozisiýalaryň has çaltlaşmagyna we peselmegine mümkinçilik berýän ajaýyp berklik derejesini hödürleýär.
Döwrebap enjamlaşdyrmagyň artykmaçlyklary we kemçilikleri
Öňdebaryjy robot kebşirleýiş enjamlaryna maýa goýmak ep-esli peýdalary getirýär, ýöne habarly karar bermek üçin potensial kemçiliklere garamak möhümdir.
Giňişleýin armaturanyň taraplary
- Yzygiderlilik: Her kebşiniň birmeňzeş bolmagyny üpjün edip, adamyň üýtgemegini aradan aýyrýar.
- Tizlik: Optimallaşdyrylan bölümiň görkezilmegi we çalt gysylmagy arkaly sikl wagtyny düýpgöter azaldar.
- Howpsuzlyk: Operatorlary arkadan we gyzgyn metaldan uzaklaşdyrýar, esasanam awtomatiki ýüklemek / düşürmek bilen.
- Maglumatlaryň görünişi: Akylly enjamlar önümçilik sanlary we ýalňyşlyk derejeleri barada real wagt maglumatlary berýär.
Zerur taraplary we kynçylyklary
- Initialokary başlangyç maýa: Customörite, awtomatlaşdyrylan enjamlaryň bahasy kiçi dükanlar üçin gadagan bolup biler.
- Bejeriş çylşyrymlylygy: Hereket edýän bölekler, datçikler we herekete getirijiler yzygiderli tehniki hyzmaty we ökde tehnikleri talap edýär.
- Ygtybarlylyk we çeýeligi: Önümiň dizaýny birneme üýtgese, ýokary derejede optimallaşdyrylan aýratyn enjamlar peýdasyz bolup biler.
- Integrasiýa wagty: Çylşyrymly akylly enjamlary işe girizmek, ýönekeý el enjamlaryny gurmakdan has köp wagt alýar.
Hakyky dünýä amaly ssenarileri
Bu gurallaryň hakyky gurşawda nähili işleýändigine düşünmek, olaryň bahasyny kontekstleşdirmäge kömek edýär. Ine, 2026 önümçilik pollarynda görlen üç umumy ssenariýa.
Awtoulag kiçi gurnama setirleri
Awtoulag 1-nji üpjün edijilerde köp sanly ýörite stansiýaly uly aýlaw indeks tablisalary adaty zat. Bir stansiýa ýüklenýär, beýlekisi kebşirlenýär. Bu enjamlara köplenç gidrotehniki gysgyçlar we suw sowadyjy kanallar girýär, yzygiderli kebşirleýiş amallaryndan ýylylygy dolandyrmak.
Agyr enjamlar köpelýär
Ekskawator gollary we ýük göteriji çelekler üçin bölekler köp. Bu ýerdäki gurallar kebşirleýiş howdanyny iň amatly agyrlyk ýagdaýynda saklamak üçin agyr ýygnanyşygy egirmek we aýlamak ýaly hereket edýär. Bu ulgamlar ygtybarly sero-hereketlendirijilere bil baglaýarlar we köplenç bilelikdäki üýtgeşmeleri yzarlamak üçin tikiş yzarlaýyş datçiklerini birleşdirýärler.
Elektronika we lukmançylyk enjamlary
Örän estetikany we mikroskopiki takyklygy talap edýän pudaklarda, bürünç ýa-da örtülen alýumin ýaly ýalpyldawuk materiallardan gurallar ýasalýar. Wakuum gysyjy ýa-da näzik mehaniki barmaklary, yz galdyrman inçe diwarly berkitmeleri ulanýarlar. Arassa otagyň sazlaşyklylygy köplenç talap bolup durýar.
Robot kebşirleýiş enjamlary barada ýygy-ýygydan soralýan soraglar
Umumy soraglara ýüzlenmek, bu ulgamlaryň kabul edilmegi we işleýşi bilen baglanyşykly näbellilikleri aýdyňlaşdyrmaga kömek edýär.
Customörite gurallary dizaýn etmek we gurmak üçin näçe wagt gerek?
Wagt görkezijisi çylşyrymlylyga baglylykda ep-esli üýtgeýär. Simpleönekeý modully gurnama birnäçe günden taýýar bolup biler. Customörite işlemek we elektrik integrasiýasy bilen çylşyrymly, köp stansiýaly awtomatlaşdyrylan gural, adatça dizaýny tassyklamakdan gurnama çenli 8-12 hepde dowam edýär.
Robot üçin köne el enjamyny täzeden alyp bilerinmi?
Tehniki taýdan mümkin bolsa-da, köplenç maslahat berilmeýär. El bilen enjamlarda robot üçin zerur takyk gaýtalanma we fakel arassalanylyşy ýok. Gaýtadan işlemek, adatça täzesini gurmak üçin çykdajy edýär we şonda-da öndürijilik meselesine sebäp bolup biler. Maksatly çözgüt üçin maýa goýmak has gowudyr.
Kebşirleýiş enjamynyň ömri näçe?
Dogry hyzmat etmek bilen, ýokary hilli polat armatura 10-15 ýyl ýa-da ondanam köp dowam edip biler. Şeýle-de bolsa, lokatorlar, gysgyçlar we datçikler ýaly zatlary geýiň, ulanyş intensiwligine baglylykda her 3 ýyldan bir gezek çalşylmagyna mätäç bolup biler. Takyklygy saklamak üçin spatteri yzygiderli arassalamak möhümdir.
Akylly enjamlary işletmek üçin ýörite okuw gerekmi?
Esasy amal, adaty tehnikalara meňzeş minimal okuwy talap edýär. Şeýle-de bolsa, datçigiň ýalňyşlyklaryny düzetmek, nol nokatlary gaýtadan hasaplamak we ownuk düzedişleri ýerine ýetirmek belli bir mehatronika ýa-da robot tehnikasy bolan tehnikleri talap edýär.
Modully enjamlar ýokary çydamly kebşirlemek üçin ýeterlikmi?
Hawa, häzirki zaman ýokary takyklykly modul ulgamlary, robot kebşirleme programmalarynyň köpüsi üçin ýeterlik ± 0.05mm içinde gaýtalanyp bilýär. Esasy esasy gözenegiň dogry kalibrlenmegini we komponentleriň görkezilen tork bahalaryna berkidilmegini üpjün etmek.
Geljekki dünýägaraýyş: 2026-dan soň nämä garaşmaly
Öňe seretseň, AI bilen robotlaryň ýakynlygy armaturany hasam üýtgeder. Lokatorlarda eşikleri anyklamaga we awtomatiki usulda öwezini dolmaga ukyply “öz-özüni bejermek” enjamlarynyň köpelmegine garaşýarys.
Mundan başga-da, goşmaça önümçilik (3D çap etmek) ozal işlemek mümkin bolmadyk çylşyrymly, ýeňil armatura komponentlerini çalt öndürmäge mümkinçilik berer. Bu gurşun wagtyny gysgaldyp, belli bir bölek konturlaryna laýyk gelýän ýokary derejede ýöriteleşdirilen geometriýalary döreder.
Gurluş bilen robotyň arasyndaky araçäk bulaşar. Geljekki ulgamlar, robotyň daşarky oklary bilen üznüksiz utgaşdyrylan kebşirleýiş wagtynda gurnamanyň mikro düzedişlerde hereket edýän ýerinde işjeň ýüzleri görkezip biler.
Netije we strategiki teklipler
Saýlaw robot kebşirleýiş enjamlary öndürijilige, hiline we girdejililigine gönüden-göni täsir edýän strategiki karar. 2026-njy ýyla tarap öňe baranymyzda, bazar tygşytly modully toplumlardan ýokary çylşyrymly akylly öýjüklere çenli dürli çözgütleri hödürleýär.
Volumeokary göwrümli öndürijiler üçin aýratyn, awtomatlaşdyrylan gaty gurallara maýa goýmak, geçirijiligi ýokarlandyrmak üçin iň täsirli ýol bolup galýar. Munuň tersine, ösýän önüm çyzyklary bolan iş dükanlary we kompaniýalar çeýeligi saklamak üçin çeýe, modully ulgamlary ileri tutmalydyrlar. Gözleg, işläp taýýarlamak we bu gurallary öndürmek boýunça ýöriteleşen tejribeli üpjün edijiler bilen hyzmatdaşlyk netijelilik we çeýeligiň iň täze täzeliklerine girmegi üpjün edýär.
Indi kim täzelemeli? Häzirki gurnamaňyz ýygy-ýygydan işlemekden, uzak wagtlap üýtgetmekden ýa-da ökde kebşirleýjileri işe almakdan ejir çekýän bolsa, robot armatura çözgüdine geçmek hökmanydyr. ROI köplenç zähmeti tygşytlamak we galyndylary azaltmak arkaly 12-18 aýyň içinde amala aşyrylýar.
Öňe gitmek üçin häzirki kebşirleýiş işleriňizi düýpli gözden geçiriň. Päsgelçilikleri kesgitläň we belli bir pudagyňyzda üstünlikli mysallary görkezip biljek abraýly integratorlar bilen iş salyşyň. Elýeterlilik bilen berkligi deňleşdirýän we maýa goýum meýilnamaňyzda geljekdäki göwrümliligini göz öňünde tutýan dizaýnlary ileri tutuň.