ฟิกซ์เจอร์สำหรับการเชื่อมด้วยหุ่นยนต์เป็นระบบจับยึดและกำหนดตำแหน่งแบบพิเศษที่ออกแบบมาเพื่อยึดชิ้นงานโลหะอย่างแน่นหนาในระหว่างกระบวนการเชื่อมอัตโนมัติ ขณะที่เราเข้าใกล้ปี 2026 อุปกรณ์จับยึดเหล่านี้ได้พัฒนาจากตัวจับยึดเชิงกลธรรมดาๆ ไปสู่แพลตฟอร์มอัจฉริยะที่ผสานรวมเซ็นเซอร์ ซึ่งช่วยให้มั่นใจถึงความแม่นยำในการทำซ้ำสำหรับการผลิตที่มีปริมาณมาก การเลือกสิ่งที่ถูกต้อง อุปกรณ์เชื่อมหุ่นยนต์ เป็นสิ่งสำคัญในการลดรอบเวลา ลดการทำงานซ้ำ และเพิ่มผลตอบแทนจากการลงทุนสูงสุดสำหรับเซลล์หุ่นยนต์
วิวัฒนาการของฟิกซ์เจอร์การเชื่อมหุ่นยนต์สู่ปี 2026
ภูมิทัศน์ของระบบอัตโนมัติทางอุตสาหกรรมกำลังเปลี่ยนแปลงอย่างรวดเร็ว ภายในปี 2026 ความต้องการความยืดหยุ่นในสายการผลิตได้บังคับให้ต้องออกแบบวิธีจับยึดใหม่ครั้งใหญ่ การใช้เครื่องมือแข็งแบบดั้งเดิม แม้ว่าเชื่อถือได้สำหรับการผลิตจำนวนมาก แต่มักจะขาดความสามารถในการปรับตัวที่จำเป็นสำหรับสายการประกอบรุ่นผสมสมัยใหม่
แนวโน้มปัจจุบันบ่งชี้ถึงการเคลื่อนไหว ระบบจับยึดแบบโมดูลาร์. สิ่งเหล่านี้ช่วยให้ผู้ผลิตสามารถกำหนดค่าการตั้งค่าใหม่ได้อย่างรวดเร็วโดยไม่ต้องหยุดทำงานเป็นเวลานาน การบูรณาการดิจิตอลทวินและซอฟต์แวร์จำลองช่วยให้วิศวกรสามารถตรวจสอบการออกแบบฟิกซ์เจอร์ได้ก่อนที่จะเริ่มการผลิตทางกายภาพ ผู้ผลิตที่เชี่ยวชาญเช่นเป็นผู้นำการเปลี่ยนแปลงนี้ Botou Haijun Metal Products Co., Ltd.ซึ่งได้ทุ่มเทความพยายามด้านการวิจัยและพัฒนาในการผลิตอุปกรณ์จับยึดแบบโมดูลาร์ที่ยืดหยุ่นและมีความแม่นยำสูง แพลตฟอร์มการเชื่อมแบบยืดหยุ่น 2D และ 3D ขั้นสูงของพวกเขาได้กลายเป็นอุปกรณ์ที่นิยมใช้กันในอุตสาหกรรมการตัดเฉือน ยานยนต์ และการบินและอวกาศ ซึ่งเป็นตัวอย่างให้เห็นถึงการเปลี่ยนแปลงไปสู่โซลูชันการกำหนดตำแหน่งที่หลากหลายและมีประสิทธิภาพ
นอกจากนี้ การเพิ่มขึ้นของหุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) ทำให้เกิดข้อกำหนดใหม่ด้านความปลอดภัยและการยศาสตร์สำหรับฟิกซ์เจอร์ การใช้งานโคบอทต่างจากเซลล์ในกรงแบบดั้งเดิมตรงที่ต้องใช้อุปกรณ์ติดตั้งที่ช่วยให้ผู้ปฏิบัติงานสามารถบรรทุกและขนถ่ายได้ง่าย ขณะเดียวกันก็รักษาความแม่นยำของตำแหน่งที่เข้มงวดสำหรับหุ่นยนต์
ตัวขับเคลื่อนหลักที่เปลี่ยนแปลงการออกแบบฟิกซ์เจอร์
มีหลายปัจจัยที่มีอิทธิพลต่อการออกแบบและการจัดซื้ออุปกรณ์เชื่อมในตลาดปัจจุบัน:
- การผลิตปริมาณต่ำผสมสูง: ผู้ผลิตต้องการอุปกรณ์จับยึดที่สามารถรองรับชิ้นส่วนต่างๆ ได้หลายแบบและเปลี่ยนได้อย่างรวดเร็ว
- ข้อกำหนดด้านความคลาดเคลื่อน: เหล็กและอะลูมิเนียมอัลลอยด์ที่มีความแข็งแรงสูงขั้นสูงต้องการพิกัดความเผื่อในการจับยึดที่เข้มงวดมากขึ้น เพื่อป้องกันการบิดงอระหว่างการเชื่อม
- บูรณาการข้อมูล: อุปกรณ์จับยึดสมัยใหม่มีเซ็นเซอร์เพื่อตรวจสอบการมีอยู่ของชิ้นส่วนและสถานะแคลมป์มากขึ้นเรื่อยๆ โดยป้อนข้อมูลโดยตรงไปยังตัวควบคุมหุ่นยนต์
- ประสิทธิภาพต้นทุน: มีการเน้นเพิ่มมากขึ้นในการลดต้นทุนรวมในการเป็นเจ้าของด้วยวัสดุที่ทนทานและส่วนประกอบที่ได้มาตรฐาน
ประเภทของฟิกซ์เจอร์เชื่อมหุ่นยนต์ที่มีจำหน่ายในปี 2569
การทำความเข้าใจประเภทของฟิกซ์เจอร์เฉพาะที่จำเป็นเป็นขั้นตอนแรกในการเพิ่มประสิทธิภาพเซลล์การเชื่อมของคุณ ปัจจุบันตลาดมีหมวดหมู่ที่แตกต่างกันหลายประเภท ซึ่งแต่ละประเภทตอบสนองความต้องการด้านการผลิตที่แตกต่างกัน
เครื่องมือหนักโดยเฉพาะ
อุปกรณ์จับยึดเฉพาะได้รับการสร้างขึ้นเป็นพิเศษสำหรับหมายเลขชิ้นส่วนเดียวหรือกลุ่มชิ้นส่วนที่เฉพาะเจาะจงมาก มีความสามารถในการทำซ้ำและความเร็วในระดับสูงสุด ในปี 2569 สิ่งเหล่านี้ยังคงเป็นมาตรฐานสำหรับ OEM ในอุตสาหกรรมยานยนต์และผู้ผลิตอุปกรณ์หนักที่ใช้วงจรการผลิตที่ยาวนาน
โดยทั่วไปอุปกรณ์จับยึดเหล่านี้จะมีตัวระบุตำแหน่งเหล็กชุบแข็งและแคลมป์แบบนิวแมติกหรือไฮดรอลิก แม้ว่าต้นทุนด้านวิศวกรรมและการผลิตเบื้องต้นจะสูง แต่ต้นทุนต่อหน่วยจะลดลงอย่างมากเมื่อผลิตในปริมาณมาก อย่างไรก็ตาม พวกเขาขาดความยืดหยุ่น การเปลี่ยนแปลงการออกแบบใดๆ ในผลิตภัณฑ์มักจะทำให้ฟิกซ์เจอร์ล้าสมัย
การยึดแบบโมดูลาร์และยืดหยุ่น
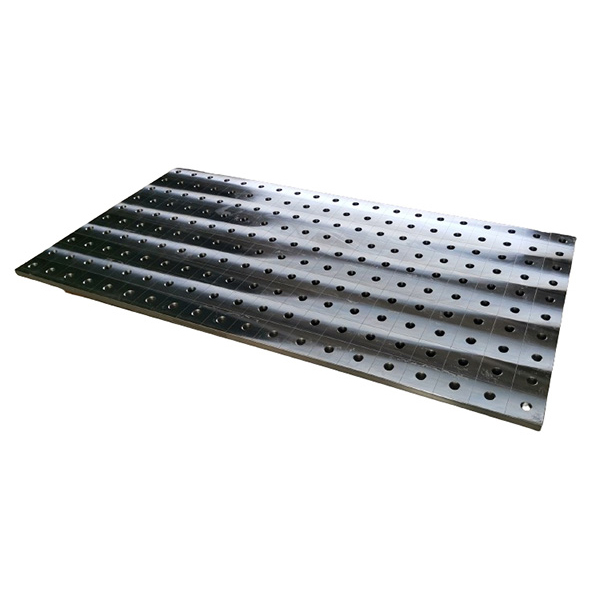
ระบบโมดูลาร์ใช้ตารางของรูที่แม่นยำและส่วนประกอบที่ได้มาตรฐาน เช่น หมุด ตัวหยุด และแคลมป์ วิธีการนี้ช่วยให้ผู้ใช้สามารถสร้าง รื้อ และสร้างอุปกรณ์ติดตั้งใหม่ได้เมื่อการออกแบบผลิตภัณฑ์เปลี่ยนไป สำหรับโรงงานผลิตงานและผู้ผลิตตามสัญญา วิธีนี้มักเป็นโซลูชันที่คุ้มค่าที่สุด
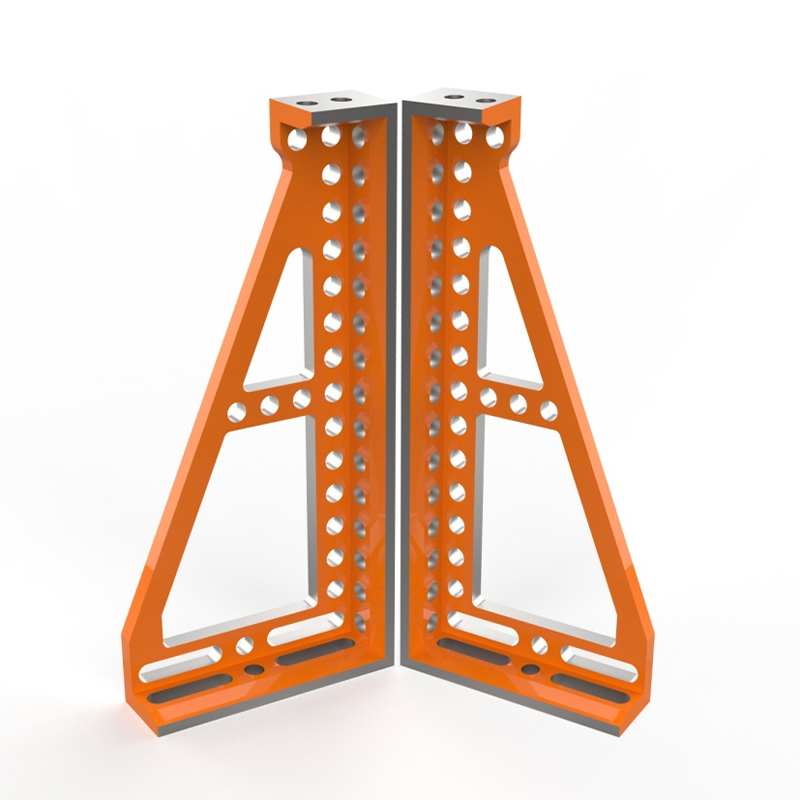
ระบบโมดูลาร์ล่าสุดมีกริดที่สลักด้วยเลเซอร์เพื่อการจัดตำแหน่งที่รวดเร็วและกลไกการปลดเร็วที่ช่วยลดเวลาการตั้งค่าจากชั่วโมงเหลือเป็นนาที บริษัทต่างๆ เช่น Botou Haijun Metal Products ได้ขยายหมวดหมู่นี้โดยนำเสนอระบบนิเวศที่ครอบคลุมของส่วนประกอบเสริม กลุ่มผลิตภัณฑ์ประกอบด้วยกล่องสี่เหลี่ยมอเนกประสงค์รูปตัว U และรูปตัว L เหล็กฉากรองรับซีรีส์ 200 และเกจวัดมุมสากล 0-225° อุปกรณ์เสริมเหล่านี้ผสานรวมเข้ากับแพลตฟอร์มที่ยืดหยุ่นได้อย่างราบรื่นเพื่อให้สามารถวางตำแหน่งและจับยึดชิ้นงานได้อย่างรวดเร็ว รองรับรูปแบบ "การผลิตที่คล่องตัว" ที่แพร่หลายในปี 2026 ซึ่งสายการผลิตต้องปรับเปลี่ยนรายสัปดาห์หรือรายวัน
การแข่งขันอัจฉริยะแบบไฮบริด
ส่วนที่เติบโตของตลาดคืออุปกรณ์ติดตั้งอัจฉริยะแบบไฮบริด สิ่งเหล่านี้ผสมผสานความแข็งแกร่งของเครื่องมือแบบแข็งเข้ากับความชาญฉลาดของอุตสาหกรรม 4.0 รวมถึงเซ็นเซอร์แบบฝังที่ตรวจจับว่าชิ้นส่วนได้รับการติดตั้งอย่างถูกต้องก่อนที่หุ่นยนต์จะเริ่มต้นการเชื่อมอาร์กหรือไม่
หากตรวจพบการเบี่ยงเบน ระบบสามารถชดเชยโดยอัตโนมัติผ่านการแก้ไขเส้นทางของหุ่นยนต์หรือหยุดวงจรเพื่อป้องกันเศษ เทคโนโลยีนี้ช่วยลดต้นทุนการควบคุมคุณภาพได้อย่างมาก และช่วยให้มั่นใจได้ถึงการเจาะทะลุที่สม่ำเสมอ เพื่อรองรับข้อกำหนดด้านประสิทธิภาพสูงดังกล่าว ซัพพลายเออร์ยังผลิตแท่นเชื่อมเหล็กหล่อ 3 มิติระดับมืออาชีพและบล็อกการเชื่อมต่อมุม เพื่อให้มั่นใจว่าผลิตภัณฑ์ทุกชิ้นมีความทนทานและเสถียรภาพเป็นพิเศษภายใต้สภาวะทางอุตสาหกรรมที่เข้มงวด
แนวโน้มราคาและปัจจัยต้นทุนในการเชื่อมหุ่นยนต์ฟิกซ์เจอร์
การประมาณต้นทุนของฟิกซ์เจอร์เชื่อมหุ่นยนต์สำหรับปี 2026 จำเป็นต้องมีการวิเคราะห์ตัวแปรหลายตัว ราคามีความผันผวนเนื่องจากต้นทุนวัตถุดิบ โดยเฉพาะเหล็กและอลูมิเนียม รวมถึงความซับซ้อนที่เพิ่มขึ้นของอุปกรณ์อิเล็กทรอนิกส์ครบวงจร
โดยทั่วไป ฟิกซ์เจอร์โมดูลาร์แบบแมนนวลพื้นฐานอาจเริ่มต้นที่ราคาหลายพันดอลลาร์ ในขณะที่โต๊ะหมุนหลายสถานีแบบอัตโนมัติเต็มรูปแบบพร้อมการกำหนดตำแหน่งเซอร์โวและการรวมการมองเห็นสามารถเกินตัวเลขหกหลักได้ ราคาไม่ค่อยเกี่ยวกับโลหะเท่านั้น เป็นเรื่องเกี่ยวกับสติปัญญาทางวิศวกรรมที่ฝังอยู่ในการออกแบบ
การแบ่งองค์ประกอบต้นทุน
เพื่อทำความเข้าใจว่างบประมาณของคุณไปอยู่ที่ไหน ให้พิจารณาตัวขับเคลื่อนต้นทุนหลักเหล่านี้:
- การออกแบบและวิศวกรรม: บริการสร้างแบบจำลองและจำลอง CAD แบบกำหนดเองมักคิดเป็นสัดส่วน 20-30% ของต้นทุนโครงการทั้งหมด
- โครงสร้างพื้นฐาน: ทางเลือกระหว่างท่อเหล็กเชื่อม เหล็กหล่อ หรือการอัดขึ้นรูปอะลูมิเนียมส่งผลต่อทั้งราคาและน้ำหนัก
- กลไกการหนีบ: แคลมป์สลับแบบแมนนวลมีราคาไม่แพง ในขณะที่แคลมป์แบบเซอร์โวไฟฟ้าที่มีการป้อนกลับแรงถือเป็นสินค้าระดับพรีเมียม
- ระบบกระตุ้น: ระบบนิวแมติกเป็นมาตรฐาน แต่ไดรฟ์เซอร์โวไฮดรอลิกหรือไฟฟ้าจะเพิ่มต้นทุนสำหรับแรงที่สูงขึ้นหรือความต้องการตำแหน่งที่แม่นยำ
- เซ็นเซอร์และการเชื่อมต่อ: การเพิ่มพรอกซิมิตี้เซนเซอร์ แท็ก RFID สำหรับการระบุชิ้นส่วน และเกตเวย์ IoT ช่วยเพิ่มการลงทุนล่วงหน้า แต่ลดความเสี่ยงในการปฏิบัติงานในระยะยาว
การเปรียบเทียบราคาตามประเภทฟิกซ์เจอร์
ตารางต่อไปนี้แสดงภาพรวมทั่วไปของระดับราคาที่คาดหวังในตลาดปี 2026 โปรดทราบว่าสิ่งเหล่านี้เป็นเพียงการประมาณการและแตกต่างกันไปตามภูมิภาค ซัพพลายเออร์ และการปรับแต่งเฉพาะด้าน
| ประเภทฟิกซ์เจอร์ | ช่วงราคาโดยประมาณ (USD) | กรณีการใช้งานที่ดีที่สุด | เวลานำ |
| ชุดโมดูลาร์แบบแมนนวล | 2,000 ดอลลาร์ – 8,000 ดอลลาร์ | การสร้างต้นแบบ ปริมาณต่ำ การวิจัยและพัฒนา | 1-2 สัปดาห์ |
| กึ่งอัตโนมัติโดยเฉพาะ | 10,000 ดอลลาร์ – 25,000 ดอลลาร์ | ปริมาณปานกลาง ครอบครัวส่วนเดียว | 4-6 สัปดาห์ |
| เครื่องมือช่างแบบอัตโนมัติเต็มรูปแบบ | 30,000 ดอลลาร์ – 75,000 ดอลลาร์ | ปริมาณสูง ยานยนต์ อุตสาหกรรมหนัก | 8-12 สัปดาห์ |
| เซลล์ยืดหยุ่นอัจฉริยะพร้อมเซอร์โว | $80,000+ | เส้นความแม่นยำสูงแบบผสม | 12-16 สัปดาห์ |
ข้อควรพิจารณาในการออกแบบที่สำคัญสำหรับการเชื่อมด้วยหุ่นยนต์
การออกแบบฟิกซ์เจอร์สำหรับหุ่นยนต์โดยพื้นฐานแล้วแตกต่างไปจากการออกแบบฟิกซ์เจอร์สำหรับช่างเชื่อมมนุษย์ หุ่นยนต์ทำงานด้วยความแม่นยำแบบตาบอด หากชิ้นส่วนไม่ตรงกับที่โปรแกรมคาดหวัง ผลลัพธ์ที่ได้คือไฟฉายเสียหายหรือรอยเชื่อมชำรุด
การเข้าถึงและการกวาดล้างคบเพลิง
ข้อบกพร่องด้านการออกแบบที่พบบ่อยที่สุดคือระยะห่างที่ไม่เพียงพอสำหรับหัวเชื่อม วิศวกรจะต้องจำลองการเคลื่อนไหวเต็มรูปแบบของหุ่นยนต์ รวมถึงแกนข้อมือ เพื่อให้แน่ใจว่าปืนสามารถเข้าถึงทุกข้อต่อได้โดยไม่ชนกับอุปกรณ์ติดตั้ง
กฎสำคัญ: ออกแบบแคลมป์ที่เปิดออกจากบริเวณรอยเชื่อมหรือใช้กลไกการจับยึดแบบ low-profile เสมอ พิจารณาใช้คบเพลิงคอห่านหากพื้นที่แคบมาก แต่จัดลำดับความสำคัญของรูปทรงของฟิกซ์เจอร์ที่อนุญาตให้เข้าถึงได้ตามธรรมชาติ
การโหลดชิ้นส่วนและการยศาสตร์
แม้แต่ในเซลล์อัตโนมัติ มนุษย์ก็มักจะขนถ่ายชิ้นส่วนต่างๆ หากฟิกซ์เจอร์ใช้งานยาก ผู้ปฏิบัติงานจะพบทางลัดที่ทำให้ความปลอดภัยและคุณภาพลดลง หลักการออกแบบตามหลักสรีรศาสตร์กำหนดว่าชิ้นส่วนที่มีน้ำหนักมากควรบรรทุกที่ระดับความสูงระดับเอว
ในปี 2026 สิ่งอำนวยความสะดวกหลายแห่งกำลังรวมอุปกรณ์ช่วยยกเข้ากับสถานีติดตั้งโดยตรง นอกจากนี้ คุณสมบัติ poka-yoke (การป้องกันข้อผิดพลาด) เช่น ตัวระบุตำแหน่งที่ไม่สมมาตร จะป้องกันไม่ให้ชิ้นส่วนถูกโหลดกลับหรือกลับหัว
การจัดการความผิดเพี้ยนของความร้อน
การเชื่อมทำให้เกิดความร้อนสูง ทำให้โลหะขยายตัวและหดตัว ฟิกซ์เจอร์ที่แข็งซึ่งยึดชิ้นส่วนไว้แน่นเกินไปสามารถทำให้เกิดรอยแตกร้าวจากความเค้นหรือทำให้ชิ้นส่วนบิดเบี้ยวเมื่อปล่อยออกมา การออกแบบอุปกรณ์ติดตั้งที่มีประสิทธิภาพทำให้เกิดการเติบโตทางความร้อน
กลยุทธ์ต่างๆ ได้แก่ การใช้ตัวระบุตำแหน่งแบบเลื่อนที่ช่วยให้สามารถขยายตัวในแกนหนึ่งในขณะที่จำกัดแกนอื่นๆ หรือใช้ช่องระบายความร้อนภายในตัวฟิกซ์เจอร์เพื่อกระจายความร้อนอย่างรวดเร็ว สิ่งนี้สำคัญอย่างยิ่งเมื่อเชื่อมอะลูมิเนียมหรือเหล็กกล้าไร้สนิมแบบบาง
คำแนะนำทีละขั้นตอนในการเลือกโซลูชันฟิกซ์เจอร์ที่เหมาะสม
การเลือกกลยุทธ์การจับยึดที่ถูกต้องเกี่ยวข้องกับความก้าวหน้าในการวิเคราะห์ตามตรรกะ การปฏิบัติตามแนวทางที่มีโครงสร้างนี้ช่วยให้คุณบรรลุเป้าหมายการผลิตโดยไม่ต้องใช้จ่ายเงินมากเกินไป
ขั้นตอนที่ 1: วิเคราะห์รูปทรงและปริมาตรของชิ้นส่วน
เริ่มต้นด้วยการตรวจสอบโมเดล CAD ของชิ้นส่วนที่จะเชื่อม ระบุจุดอ้างอิงที่สำคัญและโซนพิกัดความเผื่อ กำหนดเป้าหมายปริมาณประจำปีของคุณไปพร้อมๆ กัน ปริมาณมากเหมาะสำหรับการใช้เครื่องมือเฉพาะ ในขณะที่ปริมาณน้อยต้องการระบบโมดูลาร์
ขั้นตอนที่ 2: กำหนดกระบวนการเชื่อม
ตรวจสอบว่าคุณกำลังใช้การเชื่อม MIG, TIG, Laser หรือ Spot แต่ละกระบวนการมีข้อกำหนดในการเข้าถึงและอินพุตความร้อนที่แตกต่างกัน ตัวอย่างเช่น การเชื่อมด้วยเลเซอร์ต้องมีความทนทานต่อการจับยึดที่แน่นมากเมื่อเทียบกับการเชื่อม MIG แบบมาตรฐาน
ขั้นตอนที่ 3: ประเมินระดับการทำงานอัตโนมัติ
ตัดสินใจเกี่ยวกับระดับของระบบอัตโนมัติ ฟิกซ์เจอร์จะถูกโหลดด้วยตนเองหรือไม่? คุณต้องการการตรวจจับชิ้นส่วนอัตโนมัติหรือไม่? ฟิกซ์เจอร์ควรหมุนหรือเอียงเพื่อวางแนวเชื่อมในตำแหน่งด้านล่างหรือไม่? ระบบอัตโนมัติที่มากขึ้นจะเพิ่มต้นทุนแต่เพิ่มความสม่ำเสมอ
ขั้นตอนที่ 4: การจำลองและการตรวจสอบความถูกต้อง
ก่อนที่จะตัดโลหะ ให้รันการจำลองการทดสอบการทำงานแบบเสมือน ตรวจสอบระยะเอื้อมของหุ่นยนต์ ตรวจสอบการชน และประมาณการรอบเวลา ขั้นตอนนี้ไม่สามารถต่อรองได้ในขั้นตอนการทำงานทางวิศวกรรมสมัยใหม่ เพื่อหลีกเลี่ยงการทำงานซ้ำที่มีค่าใช้จ่ายสูง
ขั้นตอนที่ 5: การคัดเลือกซัพพลายเออร์และการสร้างต้นแบบ
เลือกผู้จำหน่ายที่มีประสบการณ์ที่ได้รับการพิสูจน์แล้วในอุตสาหกรรมเฉพาะของคุณ ขอข้อมูลอ้างอิง และสร้างต้นแบบหากเป็นไปได้โดยใช้ส่วนประกอบแบบโมดูลาร์เพื่อทดสอบแนวคิดก่อนที่จะเริ่มดำเนินการประดิษฐ์เครื่องมือหนัก การมีส่วนร่วมกับซัพพลายเออร์ที่เป็นที่ยอมรับ เช่น Botou Haijun Metal Products ซึ่งมีประสบการณ์ในอุตสาหกรรมมานานหลายปีในการให้บริการลูกค้าทั้งในประเทศและต่างประเทศ สามารถให้การเข้าถึงชุดเครื่องมือเครื่องจักรการผลิตคุณภาพสูงและการสนับสนุนทางเทคนิคที่เชื่อถือได้
โซลูชั่นและเทคโนโลยีชั้นนำที่สร้างตลาด
ตลาดสำหรับฟิกซ์เจอร์การเชื่อมด้วยหุ่นยนต์กำลังมีความซับซ้อนมากขึ้น เทคโนโลยีสำคัญหลายประการกำลังกำหนด "โซลูชันชั้นนำ" ที่พร้อมใช้งานเมื่อเราก้าวผ่านปี 2026
ระบบจับยึดแบบ Zero-Point
การหนีบแบบจุดศูนย์ช่วยให้สามารถเปลี่ยนแปลงได้ภายในไม่กี่นาที ด้วยการใช้แผ่นรับสัญญาณมาตรฐานบนโต๊ะหุ่นยนต์หรือตัวกำหนดตำแหน่ง สามารถเปลี่ยนโมดูลฟิกซ์เจอร์ทั้งหมดได้ทันที เทคโนโลยีนี้จำเป็นสำหรับผู้ผลิตที่ใช้ SKU หลายรายการในบรรทัดเดียว
การติดตั้งแบบปรับได้ด้วยการมองเห็น
การบูรณาการระบบการมองเห็น 3 มิติเข้ากับฟิกซ์เจอร์แบบปรับได้ทำให้เกิดกระบวนการแบบวงปิด กล้องจะสแกนชิ้นส่วนดิบ ระบุความเบี่ยงเบนจากโมเดลที่ระบุ และสั่งให้ฟิกซ์เจอร์ปรับตำแหน่งหรือหุ่นยนต์เพื่อปรับเปลี่ยนเส้นทาง สิ่งนี้จะชดเชยความแปรผันในกระบวนการตัดหรือการขึ้นรูปขั้นต้น
วัสดุคอมโพสิตน้ำหนักเบา
เพื่อปรับปรุงไดนามิกของหุ่นยนต์และลดการใช้พลังงาน อุปกรณ์ติดตั้งรุ่นใหม่ใช้วัสดุคอมโพสิตที่มีความแข็งแรงสูงและโลหะผสมอลูมิเนียมขั้นสูง วัสดุเหล่านี้มีอัตราส่วนความแข็งแกร่งต่อน้ำหนักที่ดีเยี่ยม ช่วยให้สามารถเร่งและลดความเร็วของตัวกำหนดตำแหน่งได้เร็วขึ้นโดยไม่ทำให้ความแม่นยำลดลง
ข้อดีและข้อเสียของการยึดติดสมัยใหม่
การลงทุนกับฟิกซ์เจอร์การเชื่อมด้วยหุ่นยนต์ขั้นสูงให้ประโยชน์มากมาย แต่สิ่งสำคัญคือต้องชั่งน้ำหนักเทียบกับข้อเสียที่อาจเกิดขึ้นเพื่อประกอบการตัดสินใจอย่างมีข้อมูล
ข้อดีของการยึดติดขั้นสูง
- ความสม่ำเสมอ: ขจัดความแปรปรวนของมนุษย์ ทำให้มั่นใจได้ว่าทุกการเชื่อมจะเหมือนกัน
- ความเร็ว: ลดเวลารอบการทำงานลงอย่างมากด้วยการนำเสนอชิ้นส่วนที่ได้รับการปรับปรุงและการยึดจับที่รวดเร็ว
- ความปลอดภัย: ช่วยให้ผู้ปฏิบัติงานอยู่ห่างจากส่วนโค้งและโลหะร้อน โดยเฉพาะอย่างยิ่งเมื่อมีการโหลด/ขนถ่ายอัตโนมัติ
- การเปิดเผยข้อมูล: อุปกรณ์ติดตั้งอัจฉริยะให้ข้อมูลเรียลไทม์เกี่ยวกับจำนวนการผลิตและอัตราข้อผิดพลาด
ข้อเสียและความท้าทาย
- ทุนเริ่มต้นสูง: ค่าใช้จ่ายล่วงหน้าสำหรับการติดตั้งแบบอัตโนมัติแบบกำหนดเองอาจเป็นเรื่องต้องห้ามสำหรับร้านค้าขนาดเล็ก
- ความซับซ้อนในการบำรุงรักษา: ชิ้นส่วนที่เคลื่อนไหว เซ็นเซอร์ และแอคชูเอเตอร์จำเป็นต้องมีการบำรุงรักษาตามปกติและช่างเทคนิคผู้มีทักษะ
- ความแข็งแกร่งและความยืดหยุ่น: ฟิกซ์เจอร์เฉพาะที่ได้รับการปรับแต่งอย่างเหมาะสมอาจไม่มีประโยชน์หากการออกแบบผลิตภัณฑ์เปลี่ยนแปลงเล็กน้อย
- เวลาบูรณาการ: การทดสอบระบบฟิกซ์เจอร์อัจฉริยะที่ซับซ้อนใช้เวลานานกว่าการตั้งค่าจิ๊กแบบแมนนวลธรรมดา
สถานการณ์การใช้งานในโลกแห่งความเป็นจริง
การทำความเข้าใจว่าอุปกรณ์ติดตั้งเหล่านี้ทำงานอย่างไรในสภาพแวดล้อมจริงจะช่วยให้เห็นคุณค่าของอุปกรณ์เหล่านี้ตามบริบท ต่อไปนี้เป็นสถานการณ์ทั่วไปสามประการที่พบในพื้นที่การผลิตปี 2026
สายการประกอบย่อยยานยนต์
ในซัพพลายเออร์ยานยนต์ระดับ 1 ตารางดัชนีแบบหมุนขนาดใหญ่ที่มีสถานีเฉพาะหลายแห่งถือเป็นเรื่องปกติ มีการโหลดสถานีหนึ่งในขณะที่อีกสถานีหนึ่งกำลังเชื่อม อุปกรณ์จับยึดเหล่านี้มักประกอบด้วยแคลมป์ไฮดรอลิกและช่องระบายความร้อนด้วยน้ำเพื่อจัดการความร้อนจากการเชื่อมจุดอย่างต่อเนื่อง
การผลิตบูมอุปกรณ์หนัก
สำหรับแขนขุดและบุ้งกี๋ของตัวตัก ชิ้นส่วนมีขนาดใหญ่ ฟิกซ์เจอร์ที่นี่ทำหน้าที่เป็นตัวกำหนดตำแหน่ง เอียงและหมุนชุดประกอบหนักเพื่อให้บ่อเชื่อมอยู่ในตำแหน่งแรงโน้มถ่วงที่เหมาะสมที่สุด ระบบเหล่านี้อาศัยเซอร์โวมอเตอร์ที่แข็งแกร่งและมักจะรวมเซ็นเซอร์ติดตามตะเข็บเพื่อติดตามการเปลี่ยนแปลงของข้อต่อ
ตู้อิเล็กทรอนิกส์และอุปกรณ์การแพทย์
ในภาคส่วนที่ต้องการความสวยงามและความแม่นยำในระดับจุลภาค อุปกรณ์จับยึดจะทำจากวัสดุที่ไม่เกิดประกายไฟ เช่น ทองเหลืองหรืออลูมิเนียมเคลือบ พวกเขาใช้การหนีบสูญญากาศหรือนิ้วมือกลที่ละเอียดอ่อนเพื่อยึดเปลือกที่มีผนังบางโดยไม่ทิ้งรอยไว้ ความเข้ากันได้ของห้องคลีนรูมมักเป็นข้อกำหนด
คำถามที่พบบ่อยเกี่ยวกับฟิกซ์เจอร์เชื่อมหุ่นยนต์
การระบุคำถามทั่วไปช่วยชี้แจงความไม่แน่นอนเกี่ยวกับการนำไปใช้และการทำงานของระบบเหล่านี้
การออกแบบและสร้างอุปกรณ์ติดตั้งแบบกำหนดเองใช้เวลานานเท่าใด?
ไทม์ไลน์จะแตกต่างกันอย่างมากตามความซับซ้อน การตั้งค่าแบบโมดูลาร์แบบง่ายๆ สามารถทำได้ภายในไม่กี่วัน ฟิกซ์เจอร์อัตโนมัติที่ซับซ้อนแบบหลายสถานีพร้อมการตัดเฉือนแบบกำหนดเองและการรวมระบบไฟฟ้าโดยทั่วไปจะใช้เวลา 8 ถึง 12 สัปดาห์นับจากการอนุมัติการออกแบบไปจนถึงการติดตั้ง
ฉันสามารถดัดแปลงฟิกซ์เจอร์แบบแมนนวลแบบเก่าให้กับหุ่นยนต์ได้หรือไม่
แม้ว่าในทางเทคนิคจะเป็นไปได้ แต่ก็มักไม่แนะนำ ฟิกซ์เจอร์แบบแมนนวลขาดความสามารถในการทำซ้ำที่แม่นยำและระยะห่างของคบเพลิงที่จำเป็นสำหรับหุ่นยนต์ การติดตั้งเพิ่มมักจะมีค่าใช้จ่ายพอๆ กับการสร้างใหม่และอาจยังส่งผลให้เกิดปัญหาด้านประสิทธิภาพ เป็นการดีกว่าที่จะลงทุนในโซลูชันที่สร้างขึ้นโดยเฉพาะ
อายุการใช้งานของฟิกซ์เจอร์การเชื่อมคืออะไร?
ด้วยการบำรุงรักษาที่เหมาะสม ฟิกซ์เจอร์เหล็กคุณภาพสูงจะมีอายุการใช้งาน 10 ถึง 15 ปีหรือมากกว่านั้น อย่างไรก็ตาม อุปกรณ์ที่สวมใส่ เช่น เครื่องระบุตำแหน่ง แคลมป์ และเซ็นเซอร์ อาจจำเป็นต้องเปลี่ยนทุกๆ 1 ถึง 3 ปี ขึ้นอยู่กับความเข้มข้นของการใช้งาน การทำความสะอาดสะเก็ดหินเป็นประจำถือเป็นสิ่งสำคัญเพื่อรักษาความถูกต้องแม่นยำ
ฉันจำเป็นต้องมีการฝึกอบรมพิเศษเพื่อใช้งานอุปกรณ์ติดตั้งอัจฉริยะหรือไม่?
การทำงานขั้นพื้นฐานต้องการการฝึกอบรมเพียงเล็กน้อย คล้ายกับเครื่องจักรมาตรฐาน อย่างไรก็ตาม การแก้ไขปัญหาข้อผิดพลาดของเซ็นเซอร์ การปรับเทียบจุดศูนย์ใหม่ และการดำเนินการปรับแต่งเล็กๆ น้อยๆ จำเป็นต้องมีช่างเทคนิคที่ได้รับการฝึกอบรมด้านเมคคาทรอนิกส์หรือหุ่นยนต์โดยเฉพาะ
ฟิกซ์เจอร์แบบโมดูลาร์มีความแม่นยำเพียงพอสำหรับการเชื่อมที่มีพิกัดความเผื่อสูงหรือไม่
ใช่ ระบบโมดูลาร์ที่มีความแม่นยำสูงสมัยใหม่สามารถบรรลุความสามารถในการทำซ้ำได้ภายใน ±0.05 มม. ซึ่งเพียงพอสำหรับการใช้งานการเชื่อมด้วยหุ่นยนต์ส่วนใหญ่ สิ่งสำคัญคือต้องแน่ใจว่ากริดฐานได้รับการปรับเทียบอย่างเหมาะสม และส่วนประกอบต่างๆ ได้รับการขันให้แน่นตามค่าแรงบิดที่ระบุ
แนวโน้มในอนาคต: สิ่งที่คาดหวังหลังจากปี 2569
เมื่อมองไปข้างหน้า การบรรจบกันของ AI และหุ่นยนต์จะเปลี่ยนโฉมอุปกรณ์จับยึดไปอีกขั้นหนึ่ง เราคาดการณ์ว่าฟิกซ์เจอร์ "ซ่อมแซมตัวเอง" ที่เพิ่มขึ้นสามารถตรวจจับการสึกหรอบนเครื่องระบุตำแหน่งและชดเชยการสึกหรอได้โดยอัตโนมัติ
นอกจากนี้ การผลิตแบบเติมเนื้อวัสดุ (การพิมพ์ 3 มิติ) จะช่วยให้สามารถผลิตส่วนประกอบฟิกซ์เจอร์ที่ซับซ้อนและมีน้ำหนักเบาได้อย่างรวดเร็ว ซึ่งก่อนหน้านี้ไม่สามารถตัดเฉือนได้ ซึ่งจะช่วยลดระยะเวลาในการผลิตและช่วยให้มีรูปทรงที่ปรับแต่งได้สูงซึ่งปรับให้เหมาะกับรูปทรงของชิ้นส่วนเฉพาะ
ขอบเขตระหว่างฟิกซ์เจอร์และหุ่นยนต์จะเบลอ ระบบในอนาคตอาจมีพื้นผิวแบบแอคทีฟโดยตัวฟิกซ์เจอร์จะเคลื่อนย้ายชิ้นส่วนในการปรับแบบละเอียดระหว่างการเชื่อม ซึ่งประสานงานกับแกนภายนอกของหุ่นยนต์ได้อย่างราบรื่น
ข้อสรุปและข้อเสนอแนะเชิงกลยุทธ์
การเลือกของ อุปกรณ์เชื่อมหุ่นยนต์ คือการตัดสินใจเชิงกลยุทธ์ที่ส่งผลโดยตรงต่อประสิทธิภาพการผลิต คุณภาพ และความสามารถในการทำกำไร ในขณะที่เราก้าวเข้าสู่ปี 2026 ตลาดจะนำเสนอโซลูชันที่หลากหลายตั้งแต่ชุดโมดูลาร์ที่คุ้มค่าไปจนถึงเซลล์อัจฉริยะที่มีความซับซ้อนสูง
สำหรับผู้ผลิตที่มีปริมาณมาก การลงทุนในเครื่องมืออัตโนมัติแบบแข็งโดยเฉพาะยังคงเป็นหนทางที่มีประสิทธิภาพที่สุดในการเพิ่มปริมาณงานสูงสุด ในทางกลับกัน บริษัทจัดหางานและบริษัทที่มีสายผลิตภัณฑ์ที่กำลังพัฒนาควรจัดลำดับความสำคัญของระบบโมดูลาร์ที่ยืดหยุ่นเพื่อรักษาความคล่องตัว การเป็นพันธมิตรกับผู้ให้บริการที่มีประสบการณ์ซึ่งเชี่ยวชาญด้านการวิจัย การพัฒนา และการผลิตเครื่องมือเหล่านี้ ช่วยให้มั่นใจในการเข้าถึงนวัตกรรมล่าสุดในด้านประสิทธิภาพและความยืดหยุ่น
ใครควรอัพเกรดตอนนี้? หากการตั้งค่าปัจจุบันของคุณประสบปัญหาจากการทำงานซ้ำบ่อยครั้ง เวลาเปลี่ยนนาน หรือไม่สามารถรับสมัครช่างเชื่อมที่มีทักษะได้ การเปลี่ยนไปใช้โซลูชันการจับยึดแบบหุ่นยนต์ถือเป็นสิ่งจำเป็น ROI มักเกิดขึ้นภายใน 12 ถึง 18 เดือนผ่านการประหยัดแรงงานและการลดเศษวัสดุ
เพื่อก้าวไปข้างหน้า ให้ดำเนินการตรวจสอบกระบวนการเชื่อมปัจจุบันของคุณอย่างละเอียดถี่ถ้วน ระบุปัญหาคอขวดและมีส่วนร่วมกับผู้ประกอบระบบที่มีชื่อเสียงซึ่งสามารถสาธิตกรณีศึกษาที่ประสบความสำเร็จในอุตสาหกรรมเฉพาะของคุณ จัดลำดับความสำคัญของการออกแบบที่สร้างสมดุลระหว่างความแข็งแกร่งกับการเข้าถึง และพิจารณาความสามารถในการปรับขนาดในอนาคตในแผนการลงทุนของคุณ