Robotkeevitusseadmed on spetsiaalsed kinnitus- ja positsioneerimissüsteemid, mis on loodud metallist detailide turvaliseks hoidmiseks automatiseeritud keevitusprotsesside ajal. Aastale 2026 lähenedes on need seadmed arenenud lihtsatest mehaanilistest hoidikutest intelligentseteks anduritega integreeritud platvormideks, mis tagavad korduva täpsuse suuremahulise tootmise jaoks. Õige valimine robotkeevitusseadmed on ülioluline tsükliaegade minimeerimiseks, ümbertöötamise vähendamiseks ja robotrakkude investeeringutasuvuse maksimeerimiseks.
Robotkeevitusseadmete areng 2026. aasta suunas
Tööstusautomaatika maastik muutub kiiresti. Aastaks 2026 on nõudlus tootmisliinide paindlikkuse järele sundinud oluliselt ümber kujundama lähenemist kinnitusdetailidele. Traditsioonilistel kõvatööriistadel, mis on masstootmise jaoks töökindlad, puudub sageli kaasaegsete segamudelite koosteliinide jaoks vajalik kohandatavus.
Praegused suundumused viitavad liikumisele modulaarsed kinnitussüsteemid. Need võimaldavad tootjatel seadistusi kiiresti ümber konfigureerida ilma pikema seisakuta. Digitaalsete kaksikute ja simulatsioonitarkvara integreerimine võimaldab nüüd inseneridel kinnitada kinnitusdetailide kujundused enne füüsilise valmistamise algust. Juhtivad seda üleminekut spetsialiseerunud tootjad nagu Botou Haijun Metal Products Co., Ltd., mis on pühendanud oma teadus- ja arendustegevuse suure täpsusega paindlike moodulseadmete tootmisele. Nende täiustatud 2D- ja 3D-painduvad keevitusplatvormid on muutunud eelistatud seadmeteks masinatööstuses, autotööstuses ja kosmosetööstuses, näitlikustades üleminekut mitmekülgsete ja tõhusate positsioneerimislahenduste poole.
Lisaks on koostöörobotite (kobotite) kasv toonud sisse uued ohutus- ja ergonoomilised nõuded seadmete jaoks. Erinevalt traditsioonilistest puurirakkudest nõuavad kobotite rakendused kinnitusi, mis hõlbustavad inimkäitajate poolt lihtsat laadimist ja mahalaadimist, säilitades samal ajal roboti range asukohatäpsuse.
Peamised tegurid, mis muudavad valgustite disaini
Keevitusseadmete kavandamist ja hankimist praegusel turul mõjutavad mitmed tegurid:
- Suure seguga väikesemahuline tootmine: Tootjad vajavad kinnitusi, mis suudavad kiire ümberlülitusega toime tulla mitme osa variatsiooniga.
- Tolerantsinõuded: Täiustatud kõrgtugevad terased ja alumiiniumisulamid nõuavad rangemaid kinnitustolerantse, et vältida väändumist keevitamise ajal.
- Andmete integreerimine: Kaasaegsed seadmed sisaldavad üha enam andureid, mis kontrollivad osa olemasolu ja klambri olekut, edastades andmed otse roboti kontrollerile.
- Kulutõhusus: Üha enam pannakse rõhku omamiskulude vähendamisele vastupidavate materjalide ja standardsete komponentide abil.
2026. aastal saadaval olevad robotkeevitusseadmete tüübid
Nõutava kinnitusseadme konkreetse tüübi mõistmine on esimene samm keevituselemendi optimeerimisel. Praegu pakub turg mitut erinevat kategooriat, millest igaüks teenindab erinevaid tootmisvajadusi.
Spetsiaalne kõvatööriist
Spetsiaalsed kinnitusdetailid on eritellimusel valmistatud ühe osanumbri või väga spetsiifilise osade perekonna jaoks. Need pakuvad kõrgeimat korratavust ja kiirust. Aastal 2026 jäävad need standardiks autotööstuse originaalseadmete valmistajatele ja rasketehnikatootjatele, kes kasutavad pikki tootmistsükleid.
Nendel kinnitusdetailidel on tavaliselt karastatud terasest lokaatorid ja pneumaatilised või hüdraulilised klambrid. Kuigi esialgsed inseneri- ja tootmiskulud on kõrged, langeb ühiku hind suurte mahtude korral märkimisväärselt. Neil puudub aga paindlikkus; kõik toote disainimuudatused muudavad rakise tavaliselt vananenuks.
Modulaarne ja paindlik kinnitus
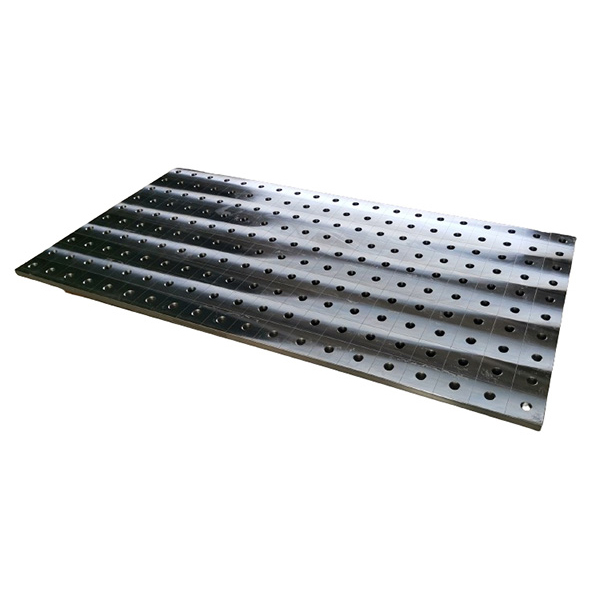
Moodulsüsteemid kasutavad täppisaukude ja standardsete komponentide võrku, nagu tihvtid, tõkked ja klambrid. See lähenemisviis võimaldab kasutajatel ehitada, demonteerida ja uuesti ehitada seadmeid, kui toote kujundus muutub. Töökodade ja lepinguliste tootjate jaoks on see sageli kõige kuluefektiivsem lahendus.
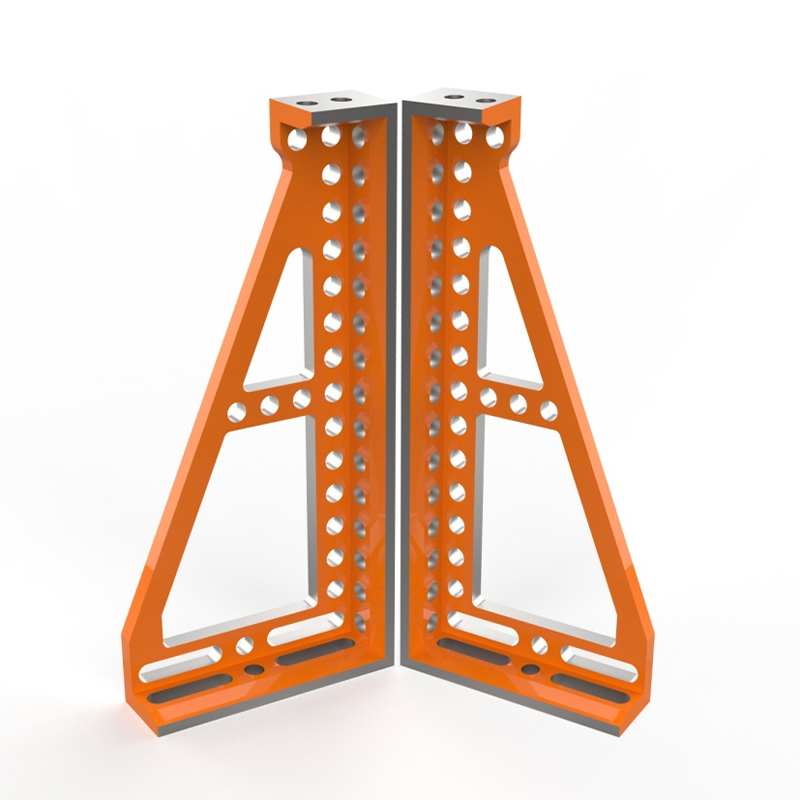
Uusimatel modulaarsetel süsteemidel on laseriga söövitatud võred kiireks joondamiseks ja kiirvabastusmehhanismid, mis vähendavad seadistamisaega tundidest minutiteks. Sellised ettevõtted nagu Botou Haijun Metal Products on seda kategooriat laiendanud, pakkudes terviklikke täiendavate komponentide ökosüsteeme. Nende valikus on U- ja L-kujulised mitmeotstarbelised kandilised karbid, 200-seeria tuginurgarauad ja 0-225° universaalsed nurgamõõturid. Need tarvikud integreeruvad sujuvalt paindlike platvormidega, et võimaldada töödeldava detaili kiiret positsioneerimist ja kinnitamist, toetades 2026. aastal levinud „agiilse tootmise” mudelit, kus tootmisliinid peavad kohanema iganädalaselt või isegi iga päev.
Hübriidsed nutikad kinnitused
Kasvav turusegment on hübriid-nutiseadmed. Need ühendavad kõvade tööriistade jäikuse ja tööstus 4.0 intelligentsuse. Nende hulka kuuluvad sisseehitatud andurid, mis tuvastavad, kas osa on õigesti paigas, enne kui robot keeviskaare käivitab.
Kui tuvastatakse kõrvalekalle, saab süsteem seda automaatselt kompenseerida roboti teekorrektsiooni abil või peatada tsükli, et vältida praagi tekkimist. See tehnoloogia vähendab oluliselt kvaliteedikontrolli kulusid ja tagab ühtlase keevisõmbluse läbitungimise. Selliste suure jõudlusega nõuete toetamiseks toodavad tarnijad ka professionaalseid malmist 3D-keevitusplatvorme ja nurkühendusplokke, tagades iga toote erakordse vastupidavuse ja stabiilsuse karmides tööstustingimustes.
Robotkeevitusseadmete hinnasuundumused ja kulutegurid
Robotkeevitusseadmete maksumuse hindamine 2026. aastaks nõuab mitme muutuja analüüsimist. Hinnad on kõikunud nii tooraine, eriti terase ja alumiiniumi hinna kui ka integreeritud elektroonika keerukuse tõttu.
Üldjuhul võib tavaline manuaalne moodulseade alata madalamatest tuhandetest dollaritest, samas kui täielikult automatiseeritud, mitme jaamaga pöördlaud koos servopositsioneerimise ja nägemise integreerimisega võib ületada kuuekohalist numbrit. Hind puudutab harva ainult metalli; see puudutab disainis sisalduvat insenerintellekti.
Kulukomponentide jaotus
Et mõista, kuhu teie eelarve kulub, kaaluge järgmisi peamisi kulukäivitajaid.
- Disain ja tehnika: Kohandatud CAD-modelleerimis- ja simulatsiooniteenused moodustavad sageli 20-30% projekti kogumaksumusest.
- Alusstruktuur: Valik keevitatud terastorude, malmi või alumiiniumi väljapressimise vahel mõjutab nii hinda kui ka kaalu.
- Kinnitusmehhanismid: Käsitsi lülitusklambrid on odavad, samas kui jõutagasisidetega servoelektrilised klambrid on esmaklassilised kaubad.
- Käivitussüsteemid: Pneumaatilised süsteemid on standardsed, kuid hüdraulilised või elektrilised servoajamid suurendavad kulusid suurema jõu või täpse positsioneerimise vajaduse korral.
- Andurid ja ühenduvus: Lähedusandurite, osade tuvastamise RFID-märgendite ja asjade Interneti-lüüside lisamine suurendab esialgset investeeringut, kuid vähendab pikaajalisi tegevusriske.
Hindade võrdlus kinnitusvahendite tüübi järgi
Järgmine tabel annab üldise ülevaate 2026. aasta turul oodatavatest hinnatasemetest. Pange tähele, et need on hinnangulised ja sõltuvad piirkonnast, tarnijast ja konkreetsest kohandamisest.
| Kinnituse tüüp | Hinnanguline hinnavahemik (USD) | Parim kasutuskohver | Juhtimisaeg |
| Manuaalne moodulkomplekt | 2000–8000 dollarit | Prototüüpimine, väike maht, teadus- ja arendustegevus | 1-2 nädalat |
| Poolautomaatne pühendatud | 10 000–25 000 dollarit | Keskmise mahuga, üheosaline perekond | 4-6 nädalat |
| Täielikult automatiseeritud kõvatööriistad | 30 000–75 000 dollarit | Suur maht, autotööstus, rasketööstus | 8-12 nädalat |
| Nutikas painduv servoelement | 80 000+ dollarit | Segamudeli ülitäpsed jooned | 12-16 nädalat |
Kriitilised konstruktsioonikaalutlused robotkeevitusel
Roboti jaoks mõeldud kinnitusdetailide projekteerimine erineb põhimõtteliselt inimese keevitajale mõeldud seadme kujundamisest. Robotid töötavad pimeda täpsusega; kui detail ei ole täpselt seal, kus programm seda eeldab, on tulemuseks kokkupõrge põleti või defektne keevisõmblus.
Juurdepääsetavus ja tõrviku eemaldamine
Kõige levinum konstruktsiooniviga on keevituspõleti ebapiisav kliirens. Insenerid peavad simuleerima roboti kogu liikumisulatust, sealhulgas randmetelgesid, tagamaks, et relv jõuaks iga liigeseni ilma kinnitusega kokku põrkamata.
Põhireegel: Kavandage alati keevistsoonist eemal avanevad klambrid või kasutage madala profiiliga kinnitusmehhanisme. Kui ruumi on väga vähe, kaaluge hanekelaga taskulampide kasutamist, kuid eelistage kinnituse geomeetriat, mis loomulikult võimaldab juurdepääsu.
Osade laadimine ja ergonoomika
Isegi automatiseeritud rakkudes laadivad inimesed sageli osi peale ja maha. Kui seadet on raske kasutada, leiavad operaatorid otseteid, mis seavad ohtu ohutuse ja kvaliteedi. Ergonoomilise disaini põhimõtted nõuavad, et rasked osad tuleb laadida vöökõrgusel.
Aastal 2026 integreerivad paljud rajatised tõsteabiseadmed otse kinnitusjaama. Lisaks takistavad poka-yoke (veakindlad) funktsioonid, nagu asümmeetrilised lokaatorid, osade tagurpidi või tagurpidi laadimist.
Termiliste moonutuste juhtimine
Keevitamine tekitab intensiivset kuumust, mis põhjustab metalli paisumist ja kokkutõmbumist. Jäik kinnitus, mis hoiab osa liiga tugevasti kinni, võib tekitada pingelõhesid või põhjustada osa vabastamisel kõverdumist. Tõhus kinnituskonstruktsioon arvestab soojuskasvu.
Strateegiate hulka kuuluvad libisevate lokaatorite kasutamine, mis võimaldavad laienemist ühel teljel, samal ajal piirates teisi, või jahutuskanalite kasutamine kinnitusdetaili korpuses, et soojust kiiresti hajutada. See on eriti oluline alumiiniumi või õhukese roostevaba terase keevitamisel.
Õige kinnituslahenduse valimise samm-sammuline juhend
Õige kinnitusstrateegia valimine hõlmab analüüsi loogilist edenemist. Selle struktureeritud lähenemisviisi järgimine tagab, et saavutate tootmiseesmärgid ilma liigsete kulutusteta.
1. samm: analüüsige detaili geomeetriat ja mahtu
Alustage keevitatavate osade CAD-mudelite ülevaatamisest. Tuvastage kriitilised nullpunktid ja tolerantsipiirkonnad. Samal ajal määrake oma iga-aastased mahueesmärgid. Suur helitugevus õigustab spetsiaalseid tööriistu, samas kui väike helitugevus nõuab modulaarsust.
2. samm: määrake keevitusprotsess
Tehke kindlaks, kas kasutate MIG-, TIG-, laser- või punktkeevitust. Igal protsessil on erinevad juurdepääsunõuded ja soojussisendid. Näiteks laserkeevitus nõuab standardse MIG-keevitusega võrreldes väga kitsaid kinnitustolerantse.
3. samm: automatiseerimise taseme hindamine
Otsustage automatiseerimise tase. Kas kinnitust laaditakse käsitsi? Kas vajate osade automaatset tuvastamist? Kas kinnitusseade peaks pöörlema või kallutama, et asetada keevisõmblus all-asendisse? Rohkem automatiseerimist suurendab kulusid, kuid parandab järjepidevust.
4. samm: Simulatsioon ja valideerimine
Enne metalli lõikamist käivitage virtuaalne kasutuselevõtu simulatsioon. Kontrollige roboti ulatust, kontrollige kokkupõrkeid ja hinnake tsükliaegu. See samm ei ole tänapäevaste inseneritöövoogude puhul läbiräägitav, et vältida kulukat ümbertöötamist.
5. samm: tarnija valik ja prototüüpimine
Valige müüja, kellel on teie konkreetses valdkonnas tõestatud kogemus. Küsige viiteid ja võimalusel koostage moodulkomponentide abil prototüüp, et testida kontseptsiooni enne kõvade tööriistade valmistamisele pühendumist. Suhtlemine väljakujunenud tarnijatega, nagu Botou Haijun Metal Products, kellel on aastatepikkune tööstuskogemus klientide teenindamisel nii riigis kui ka rahvusvaheliselt, võib pakkuda juurdepääsu kvaliteetsetele tootmismasinate tööriistasarjadele ja usaldusväärsele tehnilisele toele.
Turgu kujundavad parimad lahendused ja tehnoloogiad
Robotkeevitusseadmete turg muutub üha keerukamaks. Mitmed võtmetehnoloogiad määravad 2026. aasta jooksul saadaolevad "tipplahendused".
Nullpunkti kinnitussüsteemid
Nullpunktikinnitus võimaldab lülituda vähem kui minuti jooksul. Kasutades standardiseeritud vastuvõtjaplaati robotilaual või positsioneerijal, saab terveid kinnitusmooduleid koheselt välja vahetada. See tehnoloogia on oluline tootjate jaoks, kes kasutavad mitut SKU-d ühel real.
Adaptive Fixting with Vision
3D-nägemissüsteemide integreerimine adaptiivsete kinnitusdetailidega loob suletud ahela protsessi. Kaamera skannib töötlemata osa, tuvastab kõrvalekalded nominaalmudelist ja juhendab seadet oma lokaatoreid reguleerima või robotit oma teed muutma. See kompenseerib erinevusi ülesvoolu lõikamis- või vormimisprotsessides.
Kerged komposiitmaterjalid
Roboti dünaamika parandamiseks ja energiatarbimise vähendamiseks kasutatakse uuemates seadmetes ülitugevaid komposiite ja täiustatud alumiiniumsulameid. Need materjalid pakuvad suurepärast jäikuse ja kaalu suhet, võimaldades positsioneeride kiiremat kiirendamist ja aeglustumist täpsust ohverdamata.
Kaasaegse kinnituse eelised ja puudused
Täiustatud robotkeevitusseadmetesse investeerimine toob märkimisväärset kasu, kuid teadliku otsuse tegemiseks on oluline kaaluda neid võimalike puudustega.
Täiustatud kinnituse plussid
- Järjepidevus: Kõrvaldab inimeste varieeruvuse, tagades iga keevisõmbluse identsuse.
- Kiirus: Vähendab tsükliaega drastiliselt optimeeritud detailide esitluse ja kiire kinnitusega.
- Ohutus: Hoiab operaatorid kaarest ja kuumast metallist eemal, eriti automaatse laadimise/mahalaadimise korral.
- Andmete nähtavus: Nutikad seadmed pakuvad reaalajas andmeid toodangu arvu ja veamäärade kohta.
Miinused ja väljakutsed
- Kõrge algkapital: Kohandatud automatiseeritud seadmete esialgne maksumus võib väikeste kaupluste jaoks olla liiga suur.
- Hoolduse keerukus: Liikuvad osad, andurid ja ajamid nõuavad regulaarset hooldust ja kvalifitseeritud tehnikuid.
- Jäikus vs paindlikkus: Väga optimeeritud spetsiaalsed kinnitusdetailid võivad muutuda kasutuks, kui toote disain veidi muutub.
- Integratsiooni aeg: Keeruliste nutikate seadmete kasutuselevõtt võtab kauem aega kui lihtsate käsitsi rakiste seadistamine.
Reaalse maailma rakendusstsenaariumid
Nende seadmete tegelikus keskkonnas toimimise mõistmine aitab nende väärtust kontekstualiseerida. Siin on kolm levinumat stsenaariumit, mida on nähtud 2026. aasta tootmispõrandatel.
Autotööstuse alamkoosteliinid
Autotööstuse 1. astme tarnijate puhul on tavalised suured pöördindeksitabelid koos mitme spetsiaalse jaamaga. Ühte jaama laaditakse, samal ajal kui teist keevitatakse. Need seadmed sisaldavad sageli hüdraulilisi klambreid ja vesijahutuskanaleid, et juhtida pidevatest punktkeevitustoimingutest tulenevat soojust.
Rasketehnika noole valmistamine
Ekskavaatori hoobade ja laadurite kopade osad on massiivsed. Kinnitused toimivad siin positsioneerijatena, kallutades ja pöörates rasket koostu, et hoida keevisõmblust optimaalses gravitatsiooniasendis. Need süsteemid tuginevad tugevatele servomootoritele ja sageli integreerivad õmbluse jälgimise andurid, et jälgida liigeste variatsioone.
Elektroonika ja meditsiiniseadmete korpused
Sektorites, mis nõuavad puutumatut esteetikat ja mikroskoopilist täpsust, on valgustid valmistatud mittesädemetest materjalidest, nagu messing või kaetud alumiinium. Nad kasutavad õhukeseseinaliste korpuste hoidmiseks vaakumklambrit või õrnaid mehaanilisi sõrmi jälgi jätmata. Puhasruumi ühilduvus on sageli nõue.
Korduma kippuvad küsimused robotkeevitusseadmete kohta
Levinud päringute käsitlemine aitab selgitada nende süsteemide kasutuselevõtu ja toimimisega seotud ebakindlust.
Kui kaua kulub kohandatud seadme projekteerimiseks ja ehitamiseks?
Ajakava varieerub sõltuvalt keerukusest oluliselt. Lihtne modulaarne seadistus saab valmis mõne päevaga. Kompleksne, mitmest jaamast koosnev automatiseeritud seade koos kohandatud töötlemise ja elektrilise integratsiooniga võtab tavaliselt 8–12 nädalat projekti kinnitamisest kuni paigaldamiseni.
Kas ma saan robotile vana manuaalset kinnitust uuesti paigaldada?
Kuigi see on tehniliselt võimalik, ei ole see sageli soovitatav. Manuaalsetel kinnitustel puudub robootika jaoks vajalik täpne korratavus ja põleti kliirens. Uuendamine maksab tavaliselt sama palju kui uue ehitamine ja võib siiski põhjustada jõudlusprobleeme. Parem on investeerida eesmärgipärasesse lahendusse.
Mis on keevitusseadme eluiga?
Nõuetekohase hoolduse korral võib kvaliteetne terasest kinnitus kesta 10–15 aastat või kauem. Siiski võivad kulumisesemed, nagu lokaatorid, klambrid ja andurid, olenevalt kasutusintensiivsusest vajada väljavahetamist iga 1–3 aasta järel. Täpsuse säilitamiseks on oluline pritsmete korrapärane puhastamine.
Kas ma vajan nutiseadmete kasutamiseks erikoolitust?
Põhitöö nõuab minimaalset koolitust, sarnaselt tavaliste masinatega. Andurite vigade tõrkeotsing, nullpunktide ümberkalibreerimine ja väiksemate muudatuste tegemine nõuavad aga spetsiifilise mehhatroonika või robootika väljaõppega tehnikuid.
Kas moodulkinnitused on kõrge tolerantsiga keevitamiseks piisavalt täpsed?
Jah, kaasaegsed ülitäpsed moodulsüsteemid suudavad saavutada korratavuse vahemikus ±0,05 mm, mis on enamiku robotkeevitusrakenduste jaoks piisav. Peaasi on tagada, et alusvõre oleks korralikult kalibreeritud ja et komponendid oleksid pingutatud kindlaksmääratud pöördemomendi väärtusteni.
Tulevikuväljavaade: mida oodata pärast 2026. aastat
Tulevikku vaadates muudab AI ja robootika lähenemine varustust veelgi. Ootame "iseparanevate" seadmete levikut, mis suudavad tuvastada lokaatorite kulumist ja seda automaatselt kompenseerida.
Lisaks võimaldab lisatootmine (3D-printimine) kiiresti toota keerulisi, kergeid kinnitusdetailide komponente, mida varem oli võimatu töödelda. See lühendab teostusaega ja võimaldab väga kohandatud geomeetriat, mis on kohandatud konkreetse detaili kontuuridele.
Armatuuri ja roboti vaheline piir häguneb. Tulevased süsteemid võivad sisaldada aktiivseid pindu, kus kinnitus ise liigutab detaili keevisõmbluse ajal mikroregulatsioonidega, mis on sujuvalt kooskõlas roboti välistelgedega.
Järeldus ja strateegilised soovitused
Valik robotkeevitusseadmed on strateegiline otsus, mis mõjutab otseselt tootlikkust, kvaliteeti ja kasumlikkust. 2026. aasta poole liikudes pakub turg laia valikut lahendusi alates kulutõhusatest modulaarsetest komplektidest kuni väga keerukate nutikate elementideni.
Suuremahuliste tootjate jaoks on investeerimine spetsiaalsetesse automatiseeritud kõvatööriistadesse endiselt kõige tõhusam viis läbilaskevõime maksimeerimiseks. Vastupidi, töökojad ja arenevate tootesarjadega ettevõtted peaksid paindlikkuse säilitamiseks eelistama paindlikke modulaarseid süsteeme. Partnerlus kogenud pakkujatega, kes on spetsialiseerunud nende tööriistade uurimisele, arendustegevusele ja tootmisele, tagab juurdepääsu uusimatele uuendustele tõhususe ja paindlikkuse vallas.
Kes peaks nüüd uuendama? Kui teie praegune seadistus kannatab sagedase ümbertöötamise, pikkade vahetusaegade või suutmatuse värvata kvalifitseeritud keevitajaid, on hädavajalik üle minna robotkinnituslahendusele. ROI saavutatakse sageli 12–18 kuu jooksul tänu tööjõu kokkuhoiule ja praagi vähendamisele.
Edasiliikumiseks viige läbi oma praeguste keevitusprotsesside põhjalik audit. Tuvastage kitsaskohad ja tehke koostööd mainekate integraatoritega, kes suudavad näidata edukaid juhtumiuuringuid teie konkreetses valdkonnas. Eelistage disainilahendusi, mis tasakaalustavad jäikuse ja juurdepääsetavuse, ja arvestage oma investeerimisplaanis tulevase mastaapsusega.