Ռոբոտային եռակցման սարքերը սեղմող և տեղակայման մասնագիտացված համակարգեր են, որոնք նախատեսված են ավտոմատացված եռակցման գործընթացների ընթացքում մետաղական աշխատանքային մասերն ապահով պահելու համար: Քանի որ մենք մոտենում ենք 2026 թվականին, այս հարմարանքները պարզ մեխանիկական պահողներից վերածվել են խելացի, սենսորներով ինտեգրված հարթակների, որոնք ապահովում են կրկնվող ճշգրտություն մեծ ծավալների արտադրության համար: Ընտրելով ճիշտը ռոբոտի եռակցման հարմարանքներ կարևոր է ցիկլային ժամանակները նվազագույնի հասցնելու, վերամշակումը նվազեցնելու և ռոբոտային բջիջների համար ներդրումների վերադարձը առավելագույնի հասցնելու համար:
Ռոբոտների եռակցման սարքերի էվոլյուցիան դեպի 2026 թվական
Արդյունաբերական ավտոմատացման լանդշաֆտը արագորեն փոխվում է: Մինչև 2026 թվականը արտադրական գծերի ճկունության պահանջարկը ստիպել է հիմնովին վերանախագծել, թե ինչպես ենք մենք մոտենում ամրացմանը: Ավանդական կոշտ գործիքավորումը, չնայած հուսալի զանգվածային արտադրության համար, հաճախ չունի հարմարվողականություն, որն անհրաժեշտ է ժամանակակից խառը մոդելների հավաքման գծերի համար:
Ներկայիս միտումները ցույց են տալիս շարժ դեպի մոդուլային ամրացման համակարգեր. Դրանք արտադրողներին թույլ են տալիս արագորեն վերակազմավորել կարգավորումները՝ առանց ընդարձակ պարապուրդի: Թվային երկվորյակների և սիմուլյացիոն ծրագրաշարի ինտեգրումն այժմ հնարավորություն է տալիս ինժեներներին վավերացնել հարմարանքների նախագծերը նախքան ֆիզիկական արտադրությունը սկսելը: Այս անցման առաջատարը մասնագիտացված արտադրողներն են, ինչպիսիք են Botou Haijun Metal Products Co., Ltd., որն իր R&D ջանքերը նվիրել է բարձր ճշգրտության ճկուն մոդուլային հարմարանքների արտադրությանը: Նրանց առաջադեմ 2D և 3D ճկուն եռակցման հարթակները դարձել են նախընտրելի սարքավորումներ մեքենաշինության, ավտոմոբիլային և օդատիեզերական արդյունաբերության մեջ, ինչը ցույց է տալիս տեղաշարժը դեպի բազմակողմանի, արդյունավետ դիրքավորման լուծումներ:
Ավելին, համագործակցող ռոբոտների (կոբոտների) աճը նոր անվտանգության և էրգոնոմիկ պահանջներ է ներկայացրել հարմարանքների համար: Ի տարբերություն ավանդական վանդակի բջիջների, կոբոտի հավելվածները պահանջում են հարմարանքներ, որոնք հեշտացնում են մարդկային օպերատորների կողմից հեշտ բեռնումն ու բեռնաթափումը` միաժամանակ պահպանելով ռոբոտի խիստ դիրքային ճշգրտությունը:
Հիմնական շարժիչները, որոնք փոխում են հարմարանքների դիզայնը
Ընթացիկ շուկայում եռակցման սարքերի նախագծման և գնման վրա ազդում են մի քանի գործոններ.
- High-Mix Ցածր Ծավալ Արտադրություն: Արտադրողներին անհրաժեշտ են հարմարանքներ, որոնք կարող են կարգավորել մի քանի մասերի տատանումները արագ փոխարկումներով:
- Հանդուրժողականության պահանջներ. Ընդլայնված բարձր ամրության պողպատները և ալյումինի համաձուլվածքները պահանջում են սեղմման ավելի խիստ հանդուրժողականություն՝ եռակցման ժամանակ շեղումը կանխելու համար:
- Տվյալների ինտեգրում. Ժամանակակից հարմարանքները ավելի ու ավելի շատ են ներառում սենսորներ՝ ստուգելու մասերի առկայությունը և սեղմիչի կարգավիճակը՝ տվյալներն անմիջապես փոխանցելով ռոբոտի կարգավորիչին:
- Ծախսերի արդյունավետություն. Աճող շեշտադրում է արվում սեփականության ընդհանուր արժեքի կրճատման վրա՝ երկարակյաց նյութերի և ստանդարտացված բաղադրիչների միջոցով:
Ռոբոտների եռակցման սարքերի տեսակները հասանելի են 2026 թվականին
Հասկանալով, թե կոնկրետ տեսակի հարմարանքները պահանջվում են, ձեր եռակցման բջիջը օպտիմալացնելու առաջին քայլն է: Ներկայումս շուկան առաջարկում է մի քանի տարբեր կատեգորիաներ, որոնցից յուրաքանչյուրը սպասարկում է արտադրության տարբեր կարիքներ:
Նվիրված կոշտ գործիքավորում
Նվիրված հարմարանքները հատուկ կառուցված են մեկ մասի համարի կամ մասերի շատ հատուկ ընտանիքի համար: Նրանք առաջարկում են կրկնելիության և արագության ամենաբարձր մակարդակը: 2026 թվականին դրանք մնում են ստանդարտ ավտոմոբիլային OEM-ների և ծանր տեխնիկա արտադրողների համար, որոնք երկար արտադրական ցիկլեր ունեն:
Այս հարմարանքները սովորաբար ունեն կարծրացած պողպատե տեղորոշիչներ և օդաճնշական կամ հիդրավլիկ սեղմիչներ: Թեև նախնական ինժեներական և արտադրական ծախսերը բարձր են, մեկ միավորի արժեքը զգալիորեն նվազում է մեծ ծավալների համեմատ: Այնուամենայնիվ, նրանք չունեն ճկունություն. Արտադրանքի ցանկացած դիզայնի փոփոխություն սովորաբար սարքը դարձնում է հնացած:
Մոդուլային և ճկուն ամրացում
Մոդուլային համակարգերը օգտագործում են ճշգրիտ անցքերի ցանց և ստանդարտացված բաղադրիչներ, ինչպիսիք են կապում, կանգառներ և սեղմակներ: Այս մոտեցումը թույլ է տալիս օգտվողներին կառուցել, ապամոնտաժել և վերակառուցել հարմարանքները, քանի որ արտադրանքի դիզայնը փոխվում է: Աշխատանքի խանութների և պայմանագրային արտադրողների համար սա հաճախ ամենաարդյունավետ լուծումն է:
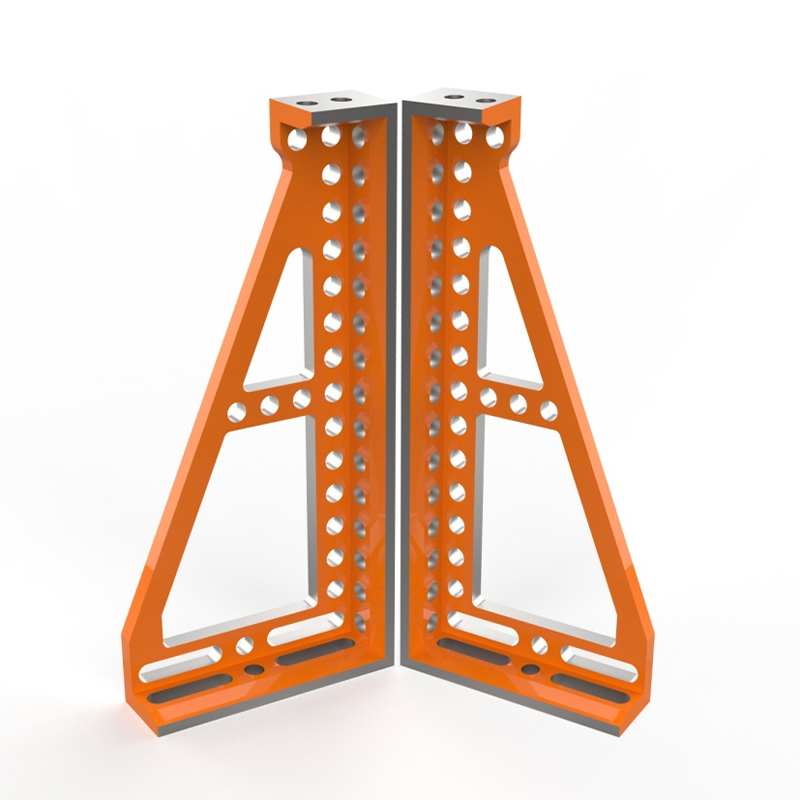
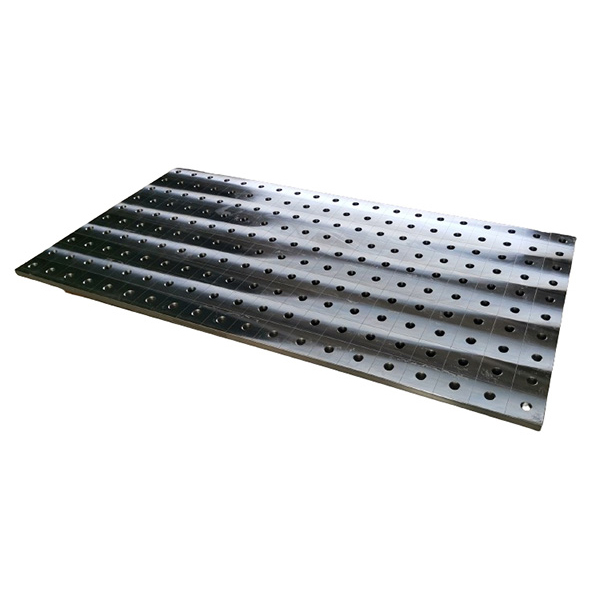
Վերջին մոդուլային համակարգերն ունեն լազերային փորագրված ցանցեր՝ արագ հավասարեցման և արագ ազատման մեխանիզմների համար, որոնք ժամերից մինչև րոպեներ կրճատում են տեղադրման ժամանակը: Botou Haijun Metal Products-ի նման ընկերություններն ընդլայնել են այս կատեգորիան՝ առաջարկելով լրացուցիչ բաղադրիչների համապարփակ էկոհամակարգեր: Դրանց տեսականին ներառում է U-աձև և L-աձև բազմաֆունկցիոնալ քառակուսի տուփեր, 200 սերիայի աջակցող անկյունային արդուկներ և 0-225° ունիվերսալ անկյունաչափեր: Այս աքսեսուարները անխափան կերպով ինտեգրվում են ճկուն հարթակների հետ՝ հնարավորություն տալով աշխատանքային մասի արագ տեղադրումը և սեղմումը, աջակցելով 2026 թվականին տարածված «արագաշարժ արտադրության» մոդելին, որտեղ արտադրական գծերը պետք է հարմարվեն շաբաթական կամ նույնիսկ ամեն օր:
Հիբրիդ խելացի հարմարանքներ
Շուկայի աճող հատվածը հիբրիդային խելացի սարքերն են: Սրանք համատեղում են կոշտ գործիքների կոշտությունը Արդյունաբերություն 4.0-ի հետախուզության հետ: Դրանք ներառում են ներկառուցված սենսորներ, որոնք հայտնաբերում են, թե արդյոք մի մասը ճիշտ է նստած, նախքան ռոբոտը կսկսի եռակցման աղեղը:
Եթե շեղում հայտնաբերվի, համակարգը կարող է ավտոմատ կերպով փոխհատուցել ռոբոտի ուղու ուղղման միջոցով կամ դադարեցնել ցիկլը՝ ջարդոնը կանխելու համար: Այս տեխնոլոգիան զգալիորեն նվազեցնում է որակի վերահսկման ծախսերը և ապահովում եռակցման հետևողական ներթափանցում: Բարձր կատարողականության նման պահանջներին աջակցելու համար մատակարարները նաև արտադրում են պրոֆեսիոնալ թուջե 3D եռակցման հարթակներ և անկյունային միացման բլոկներ՝ ապահովելով, որ յուրաքանչյուր ապրանք ապահովում է բացառիկ ամրություն և կայունություն խիստ արդյունաբերական պայմաններում:
Ռոբոտների եռակցման սարքերի գնագոյացման միտումները և ծախսերի գործոնները
2026 թվականի համար ռոբոտի եռակցման սարքերի արժեքը գնահատելը պահանջում է մի քանի փոփոխականների վերլուծություն: Գները տատանվել են հումքի, մասնավորապես պողպատի և ալյումինի ծախսերի, ինչպես նաև ինտեգրված էլեկտրոնիկայի աճող բարդության պատճառով:
Ընդհանուր առմամբ, հիմնական մեխանիկական մոդուլային հարմարանքը կարող է սկսվել ավելի ցածր հազար դոլարից, մինչդեռ լիովին ավտոմատացված, բազմակայան պտտվող սեղանը սերվո դիրքորոշմամբ և տեսողության ինտեգրմամբ կարող է գերազանցել վեց նիշը: Գինը հազվադեպ է միայն մետաղի մասին. խոսքը դիզայնի մեջ ներդրված ինժեներական ինտելեկտի մասին է։
Արժեքի բաղադրիչների բաշխում
Հասկանալու համար, թե որտեղ է գնում ձեր բյուջեն, հաշվի առեք ծախսերի հետևյալ հիմնական գործոնները.
- Դիզայն և ճարտարագիտություն. Պատվերով CAD մոդելավորման և մոդելավորման ծառայությունները հաճախ կազմում են ծրագրի ընդհանուր արժեքի 20-30%-ը:
- Բազային կառուցվածք. Եռակցված պողպատե խողովակների, չուգունի կամ ալյումինի արտամղման միջև ընտրությունը ազդում է ինչպես գնի, այնպես էլ քաշի վրա:
- Սեղմման մեխանիզմներ. Ձեռքով անջատիչ սեղմակները էժան են, մինչդեռ ուժային արձագանքով սերվո-էլեկտրական սեղմիչները պրեմիում ապրանքներ են:
- Ակտիվացման համակարգեր. Օդաճնշական համակարգերը ստանդարտ են, բայց հիդրավլիկ կամ էլեկտրական սերվո շարժիչները մեծացնում են ծախսերը ավելի մեծ ուժի կամ ճշգրիտ դիրքավորման կարիքների համար:
- Սենսորներ և միացում. Հարևանության սենսորների, մասերի նույնականացման համար RFID պիտակների և IoT դարպասների ավելացումն ավելացնում է նախնական ներդրումները, բայց նվազեցնում է երկարաժամկետ գործառնական ռիսկերը:
Գների համեմատություն ըստ հարմարանքների տեսակի
Հետևյալ աղյուսակը ներկայացնում է 2026 թվականի շուկայում սպասվող գնային մակարդակների ընդհանրացված ակնարկ: Նկատի ունեցեք, որ դրանք գնահատումներ են և տարբերվում են՝ կախված տարածաշրջանից, մատակարարից և հատուկ հարմարեցումից:
| Սարքի տեսակը | Մոտավոր գների միջակայք (ԱՄՆ դոլար) | Լավագույն օգտագործման դեպք | Առաջատար ժամանակ |
| Ձեռքով մոդուլային հավաքածու | $2000 – $8000 | Նախատիպավորում, ցածր ծավալ, R&D | 1-2 շաբաթ |
| Կիսաավտոմատացված Նվիրված | $10,000 – $25,000 | Միջին ծավալ, մեկ մասի ընտանիք | 4-6 շաբաթ |
| Լիովին ավտոմատացված կոշտ գործիքավորում | $30,000 – $75,000 | Բարձր ծավալ, ավտոմոբիլային, ծանր արդյունաբերություն | 8-12 շաբաթ |
| Խելացի ճկուն բջիջ Servo-ով | $80,000+ | Խառը մոդելի բարձր ճշգրտության գծեր | 12-16 շաբաթ |
Ռոբոտային եռակցման կարևորագույն նախագծային նկատառումներ
Ռոբոտի համար հարմարանք նախագծելը սկզբունքորեն տարբերվում է մարդու եռակցողի համար նախատեսվածից: Ռոբոտները գործում են կույր ճշգրտությամբ; եթե այդ մասը հենց այնտեղ չէ, որտեղ ծրագիրը ակնկալում է, որ այն լինի, արդյունքը վթարի ենթարկված ջահն է կամ թերի զոդում:
Մատչելիություն և ջահի մաքրում
Դիզայնի ամենատարածված թերությունը եռակցման ջահի անբավարար մաքրումն է: Ինժեներները պետք է մոդելավորեն ռոբոտի շարժման ողջ տիրույթը, ներառյալ դաստակի առանցքները, որպեսզի համոզվեն, որ ատրճանակը կարող է հասնել բոլոր հոդերին՝ առանց ամրացվող սարքի հետ բախվելու:
Հիմնական կանոն. Միշտ նախագծեք սեղմակներ, որոնք բացվում են եռակցման գոտուց հեռու կամ օգտագործում են ցածր պրոֆիլի սեղմման մեխանիզմներ: Մտածեք սագի պարանոցով ջահերի օգտագործման մասին, եթե տարածությունը չափազանց սահմանափակ է, բայց առաջնահերթություն տվեք հարմարանքների երկրաչափությանը, որը բնականաբար թույլ է տալիս մուտք գործել:
Մասերի բեռնում և էրգոնոմիկա
Նույնիսկ ավտոմատացված բջիջներում մարդիկ հաճախ բեռնում և բեռնաթափում են մասերը: Եթե հարմարանքը դժվար է օգտագործել, օպերատորները կգտնեն դյուրանցումներ, որոնք վտանգում են անվտանգությունն ու որակը: Էրգոնոմիկ դիզայնի սկզբունքները թելադրում են, որ ծանր մասերը պետք է բեռնված լինեն գոտկատեղի բարձրության վրա:
2026թ.-ին շատ հաստատություններ ինտեգրում են վերելակի օժանդակ սարքերը անմիջապես ամրացման կայանում: Բացի այդ, poka-yoke (սխալներից պաշտպանող) առանձնահատկությունները, ինչպիսիք են ասիմետրիկ տեղորոշիչները, կանխում են մասերի հետ կամ գլխիվայր բեռնումը:
Ջերմային աղավաղումների կառավարում
Եռակցումը առաջացնում է ինտենսիվ ջերմություն, ինչը հանգեցնում է մետաղի ընդլայնման և կծկման: Կոշտ սարքը, որը չափազանց ամուր է պահում մի մասը, կարող է առաջացնել սթրեսային ճաքեր կամ առաջացնել մասի շեղում ազատվելուց հետո: Արդյունավետ հարմարանքների դիզայնը հաշվի է առնում ջերմային աճը:
Ռազմավարությունները ներառում են լոգարիթմական տեղորոշիչների օգտագործումը, որոնք թույլ են տալիս ընդլայնվել մեկ առանցքով, մինչդեռ կաշկանդում են մյուսներին, կամ հովացման ալիքների օգտագործումը հարմարանքի մարմնի ներսում՝ ջերմությունն արագորեն ցրելու համար: Սա հատկապես կարևոր է ալյումինի կամ բարակ չժանգոտվող պողպատի եռակցման ժամանակ:
Քայլ առ քայլ ուղեցույց՝ հարմարանքների ճիշտ լուծում ընտրելու համար
Տեղադրման ճիշտ ռազմավարություն ընտրելը ներառում է վերլուծության տրամաբանական առաջընթաց: Այս կառուցվածքային մոտեցմանը հետևելը երաշխավորում է, որ դուք կհասնեք արտադրության նպատակներին՝ առանց ավելորդ ծախսերի:
Քայլ 1. Վերլուծեք մասի երկրաչափությունը և ծավալը
Սկսեք վերանայել եռակցվող մասերի CAD մոդելները: Բացահայտեք կրիտիկական տվյալների և հանդուրժողականության գոտիները: Միաժամանակ սահմանեք ձեր տարեկան ծավալի թիրախները: Բարձր ծավալը արդարացնում է հատուկ գործիքավորումը, մինչդեռ ցածր ծավալը պահանջում է մոդուլյարություն:
Քայլ 2. Սահմանեք եռակցման գործընթացը
Որոշեք՝ դուք օգտագործում եք MIG, TIG, լազերային կամ կետային եռակցում: Յուրաքանչյուր գործընթաց ունի մուտքի տարբեր պահանջներ և ջերմային մուտքեր: Լազերային եռակցումը, օրինակ, պահանջում է չափազանց խիստ ամրացման թույլատրելիություն՝ համեմատած ստանդարտ MIG եռակցման:
Քայլ 3. Գնահատեք ավտոմատացման մակարդակը
Որոշեք ավտոմատացման մակարդակը: Արդյո՞ք հարմարանքը ձեռքով կբեռնվի: Ձեզ անհրաժեշտ է մասերի ավտոմատ հայտնաբերում: Արդյո՞ք հարմարանքը պետք է պտտվի կամ թեքվի՝ զոդումը ներքևի դիրքում տեղադրելու համար: Ավելի շատ ավտոմատացում մեծացնում է ծախսերը, բայց բարելավում է հետևողականությունը:
Քայլ 4. Մոդելավորում և վավերացում
Նախքան մետաղը կտրելը, գործարկեք վիրտուալ սիմուլյացիա: Ստուգեք ռոբոտի հասանելիությունը, ստուգեք բախումների առկայությունը և գնահատեք ցիկլի ժամանակները: Այս քայլը սակարկելի չէ ժամանակակից ինժեներական գործընթացներում՝ ծախսատար վերամշակումից խուսափելու համար:
Քայլ 5. Մատակարարի ընտրություն և նախատիպավորում
Ընտրեք ձեր կոնկրետ ոլորտում ապացուցված փորձ ունեցող վաճառողին: Խնդրեք հղումներ և, հնարավորության դեպքում, կառուցեք նախատիպ՝ օգտագործելով մոդուլային բաղադրիչներ՝ հայեցակարգը փորձարկելու համար՝ նախքան կոշտ գործիքների պատրաստումը կատարելը: Ներգրավվելով այնպիսի հաստատված մատակարարների հետ, ինչպիսին է Botou Haijun Metal Products-ը, ովքեր ունեն արդյունաբերական տարիների փորձ՝ սպասարկելով տեղական և միջազգային հաճախորդներին, կարող է ապահովել բարձրորակ արտադրական մեքենաների գործիքների շարք և հուսալի տեխնիկական աջակցություն:
Առաջատար լուծումներ և տեխնոլոգիաներ, որոնք ձևավորում են շուկան
Ռոբոտների եռակցման սարքերի շուկան գնալով ավելի բարդ է դառնում: Մի քանի հիմնական տեխնոլոգիաներ սահմանում են «լավագույն լուծումները», որոնք հասանելի են մինչև 2026 թվականը:
Զրոյական կետի սեղմման համակարգեր
Զրոյական կետով սեղմումը թույլ է տալիս ենթափրկարարական փոփոխություններ կատարել: Օգտագործելով ստանդարտացված ընդունիչ ափսե ռոբոտի սեղանի վրա կամ դիրքավորող սարքի վրա, ամբողջ հարմարանքների մոդուլները կարող են անմիջապես փոխարինվել: Այս տեխնոլոգիան անհրաժեշտ է արտադրողների համար, որոնք աշխատում են մի քանի SKU-ներ մեկ տողում:
Adaptive Fixturing with Vision
Եռաչափ տեսողության համակարգերի ինտեգրումը հարմարվողական հարմարանքներով ստեղծում է փակ գործընթաց: Տեսախցիկը սկանավորում է չմշակված հատվածը, բացահայտում է անվանական մոդելից շեղումները և հրահանգում է սարքին հարմարեցնել իր տեղորոշիչները կամ ռոբոտին՝ փոխել իր ուղին: Սա փոխհատուցում է վերին հոսքի կտրման կամ ձևավորման գործընթացների տատանումները:
Թեթև կոմպոզիտային նյութեր
Ռոբոտի դինամիկան բարելավելու և էներգիայի սպառումը նվազեցնելու համար նոր սարքերը օգտագործում են բարձր ամրության կոմպոզիտներ և առաջադեմ ալյումինե համաձուլվածքներ: Այս նյութերն առաջարկում են կոշտություն-քաշի գերազանց հարաբերակցություններ՝ թույլ տալով ավելի արագ արագացնել և դանդաղեցնել դիրքավորող սարքերը՝ առանց ճշգրտության զոհաբերելու:
Ժամանակակից ամրացման առավելություններն ու թերությունները
Առաջադեմ ռոբոտների եռակցման սարքերում ներդրումներ կատարելը զգալի օգուտներ է բերում, սակայն կարևոր է դրանք կշռել հնարավոր թերությունների դեմ՝ տեղեկացված որոշում կայացնելու համար:
Ընդլայնված ամրագրման առավելությունները
- Հետևողականություն: Վերացնում է մարդկային փոփոխականությունը՝ ապահովելով յուրաքանչյուր եռակցման նույնականությունը:
- Արագություն: Կտրուկ նվազեցնում է ցիկլի ժամանակները՝ մասերի օպտիմիզացված ներկայացման և արագ սեղմման միջոցով:
- Անվտանգություն: Օպերատորներին հեռու է պահում աղեղից և տաք մետաղից, հատկապես ավտոմատացված բեռնման/բեռնաթափման դեպքում:
- Տվյալների տեսանելիություն. Խելացի հարմարանքները իրական ժամանակի տվյալներ են տրամադրում արտադրության քանակի և սխալների մակարդակի վերաբերյալ:
Դեմ և մարտահրավերներ
- Բարձր սկզբնական կապիտալ. Պատվերով, ավտոմատացված հարմարանքների նախնական արժեքը կարող է արգելք լինել փոքր խանութների համար:
- Սպասարկման բարդություն. Շարժվող մասերը, սենսորները և շարժիչները պահանջում են կանոնավոր սպասարկում և հմուտ տեխնիկներ:
- Կոշտություն ընդդեմ ճկունության. Բարձր օպտիմիզացված հատուկ հարմարանքները կարող են անօգուտ դառնալ, եթե արտադրանքի դիզայնը փոքր-ինչ փոխվի:
- Ինտեգրման ժամանակը. Բարդ խելացի հարմարանքների գործարկումն ավելի երկար է տևում, քան պարզ ձեռքով սալիկների տեղադրումը:
Իրական աշխարհի կիրառման սցենարներ
Հասկանալը, թե ինչպես են այս հարմարանքները գործում իրական միջավայրում, օգնում է համատեքստային դարձնել դրանց արժեքը: Ահա երեք ընդհանուր սցենարներ, որոնք դիտվում են 2026-ի արտադրության հարկերում:
Ավտոմոբիլային ենթահավաքման գծեր
Ավտոմոբիլային մակարդակի 1 մատակարարներում մեծ պտտվող ինդեքսային աղյուսակները մի քանի հատուկ կայաններով նորմ են: Մի կայանը բեռնված է, մինչդեռ մյուսը եռակցվում է: Այս հարմարանքները հաճախ ներառում են հիդրավլիկ սեղմակներ և ջրային հովացման ալիքներ՝ շարունակական կետային եռակցման աշխատանքներից առաջացած ջերմությունը կառավարելու համար:
Ծանր սարքավորումների բումի արտադրություն
Էքսկավատորի զենքերի և բեռնիչի դույլերի համար մասերը զանգվածային են: Սարքավորումներն այստեղ գործում են որպես դիրքավորողներ՝ թեքելով և պտտելով ծանր բլոկը՝ եռակցման ջրափոսը օպտիմալ ձգողականության դիրքում պահելու համար: Այս համակարգերը հենվում են ամուր սերվո շարժիչների վրա և հաճախ ինտեգրում են կարի հետագծման սենսորները՝ հետևելու հոդերի փոփոխություններին:
Էլեկտրոնիկայի և բժշկական սարքերի պատյաններ
Այն հատվածներում, որոնք պահանջում են մաքուր գեղագիտություն և մանրադիտակային ճշգրտություն, հարմարանքները պատրաստված են չկայծող նյութերից, ինչպիսիք են արույրը կամ պատված ալյումինը: Նրանք օգտագործում են վակուումային սեղմիչ կամ նուրբ մեխանիկական մատներ՝ բարակ պատերով պարիսպները առանց հետքեր թողնելու պահելու համար: Cleanroom-ի համատեղելիությունը հաճախ պահանջ է:
Հաճախակի տրվող հարցեր ռոբոտների եռակցման սարքերի մասին
Ընդհանուր հարցումների հասցեագրումն օգնում է պարզաբանել այս համակարգերի ընդունման և շահագործման հետ կապված անորոշությունները:
Որքա՞ն ժամանակ է պահանջվում հատուկ հարմարանք նախագծելու և կառուցելու համար:
Ժամանակացույցը զգալիորեն տարբերվում է՝ կախված բարդությունից: Պարզ մոդուլային կարգավորումը կարող է պատրաստ լինել մի քանի օրվա ընթացքում: Համալիր, բազմակայան ավտոմատացված սարքավորումը հատուկ մշակմամբ և էլեկտրական ինտեգրմամբ սովորաբար տևում է 8-ից 12 շաբաթ՝ դիզայնի հաստատումից մինչև տեղադրումը:
Կարո՞ղ եմ ռոբոտի համար հին մեխանիկական սարքը վերազինել:
Թեև տեխնիկապես հնարավոր է, այն հաճախ խորհուրդ չի տրվում: Ձեռնարկի հարմարանքները չունեն ռոբոտաշինության համար անհրաժեշտ ճշգրիտ կրկնելիություն և ջահի մաքրում: Վերազինումը սովորաբար արժե այնքան, որքան նորը կառուցելը, և դեռ կարող է հանգեցնել աշխատանքի հետ կապված խնդիրների: Ավելի լավ է ներդնել նպատակային լուծման մեջ:
Որքա՞ն է եռակցման սարքի կյանքի տևողությունը:
Պատշաճ սպասարկման դեպքում բարձրորակ պողպատե ամրացումը կարող է տևել 10-ից 15 տարի կամ ավելի: Այնուամենայնիվ, կրելու պարագաները, ինչպիսիք են տեղորոշիչները, սեղմակները և սենսորները, կարող են փոխարինման կարիք ունենալ 1-3 տարին մեկ՝ կախված օգտագործման ինտենսիվությունից: Ճշգրտությունը պահպանելու համար անհրաժեշտ է պարբերաբար մաքրել ցողունը:
Արդյո՞ք ինձ հատուկ ուսուցում է պետք խելացի սարքերը գործարկելու համար:
Հիմնական շահագործումը պահանջում է նվազագույն ուսուցում, որը նման է ստանդարտ մեքենաներին: Այնուամենայնիվ, սենսորների սխալների վերացումը, զրոյական կետերի վերահաշվառումը և աննշան ճշգրտումները պահանջում են հատուկ մեխատրոնիկայի կամ ռոբոտաշինության գծով տեխնիկներ:
Արդյո՞ք մոդուլային հարմարանքները բավականաչափ ճշգրիտ են բարձր հանդուրժողականությամբ եռակցման համար:
Այո, ժամանակակից բարձր ճշգրտության մոդուլային համակարգերը կարող են հասնել կրկնելիության ±0,05 մմ սահմաններում, ինչը բավարար է ռոբոտային եռակցման կիրառությունների մեծ մասի համար: Բանալին այն է, որ բազային ցանցը պատշաճ կերպով տրամաչափված լինի, և որ բաղադրիչները խստացվեն նշված ոլորող մոմենտների արժեքներին:
Ապագայի հեռանկար. Ինչ սպասել 2026-ից հետո
Նայելով առաջ՝ արհեստական ինտելեկտի և ռոբոտաշինության սերտաճումն էլ ավելի կփոխի ամրացումները: Մենք ակնկալում ենք «ինքնաբուժվող» հարմարանքների աճ, որոնք կարող են հայտնաբերել տեղորոշիչների մաշվածությունը և ինքնաբերաբար փոխհատուցել այն:
Բացի այդ, հավելումների արտադրությունը (3D տպագրություն) թույլ կտա արագ արտադրել բարդ, թեթև սարքի բաղադրիչներ, որոնք նախկինում անհնար էր մշակել: Սա կնվազեցնի սպասարկման ժամկետները և հնարավորություն կտա խիստ հարմարեցված երկրաչափություններ, որոնք հարմարեցված են կոնկրետ մասերի ուրվագծերին:
Սարքի և ռոբոտի միջև սահմանը կմղվի: Ապագա համակարգերը կարող են ունենալ ակտիվ մակերևույթներ, որտեղ եռակցման ընթացքում սարքն ինքն է տեղաշարժում հատվածը միկրո կարգավորմամբ՝ անխափան կերպով համակարգված ռոբոտի արտաքին առանցքների հետ:
Եզրակացություն և ռազմավարական առաջարկություններ
-ի ընտրությունը ռոբոտի եռակցման հարմարանքներ ռազմավարական որոշում է, որն ուղղակիորեն ազդում է արտադրողականության, որակի և շահութաբերության վրա: Մինչ մենք գնում ենք դեպի 2026 թվականը, շուկան առաջարկում է լուծումների բազմազան տեսականի՝ ծախսարդյունավետ մոդուլային փաթեթներից մինչև բարձրակարգ խելացի բջիջներ:
Մեծածավալ արտադրողների համար հատուկ, ավտոմատացված կոշտ գործիքներում ներդրումներ կատարելը մնում է թողունակությունը առավելագույնի հասցնելու ամենաարդյունավետ ճանապարհը: Ընդհակառակը, աշխատատեղերի խանութները և զարգացող արտադրանքի գիծ ունեցող ընկերությունները պետք է առաջնահերթություն դնեն ճկուն, մոդուլային համակարգերին՝ շարժունությունը պահպանելու համար: Փորձառու մատակարարների հետ համագործակցությունը, ովքեր մասնագիտացած են այս գործիքների հետազոտության, մշակման և արտադրության մեջ, ապահովում է արդյունավետության և ճկունության վերջին նորարարությունների հասանելիությունը:
Ո՞վ պետք է արդիականացնի հիմա: Եթե ձեր ընթացիկ կարգավորումը տառապում է հաճախակի վերամշակումից, երկար փոփոխության ժամանակներից կամ հմուտ եռակցողներ հավաքագրելու անկարողությունից, ռոբոտային ամրացման լուծմանն անցնելը պարտադիր է: ROI-ն հաճախ իրականացվում է 12-ից 18 ամսվա ընթացքում՝ աշխատուժի խնայողության և ջարդոնի կրճատման միջոցով:
Առաջ շարժվելու համար կատարեք ձեր ընթացիկ եռակցման գործընթացների մանրակրկիտ աուդիտ: Բացահայտեք խոչընդոտները և զբաղվեք հեղինակավոր ինտեգրատորների հետ, ովքեր կարող են ցուցադրել հաջողված դեպքերի ուսումնասիրություններ ձեր կոնկրետ ոլորտում: Առաջնահերթություն տվեք այնպիսի նախագծերին, որոնք հավասարակշռում են խստությունը մատչելիության հետ և հաշվի են առնում ապագա մասշտաբայնությունը ձեր ներդրումային պլանում: