A robot kebşirleýji gural awtomatlaşdyrylan kebşirleýiş öýjükleri üçin takyk ýerlerde metal iş böleklerini saklamak üçin döredilen ýöriteleşdirilen gysgyç enjamy. 2026-njy ýylda bu enjamlar robotyň iş wagtyny köpeltmek, 0,1 mm aralygynda gaýtalanmagyny üpjün etmek we aýlaw wagtyny 40% -e çenli azaltmak üçin möhümdir. Döwrebap çözgütler ýokary garyşyk, pes göwrümli önümçilik gurşawyny goldamak üçin çalt üýtgeýän mehanizmleri we datçige taýyn interfeýsleri birleşdirýär.
Robotly kebşirleýiş enjamy näme we 2026-njy ýylda näme üçin möhüm
2026-njy ýyldaky önümçilik peýza .y görlüp-eşidilmedik çeýeligi talap edýär. A. robot kebşirleýji gural çig mal bilen taýýar önümiň arasyndaky boşlugy aradan aýyrýan islendik awtomatlaşdyrylan öýjügiň diregi bolup hyzmat edýär. El bilen enjamlardan tapawutlylykda, bu enjamlar takyk ýylylyk sikllerine, dargamaklyga we çalt ýüklemek yzygiderliligine takyklygy ýitirmän garşy durmalydyr.
Senagat maglumatlary, nädogry kebşirlemegiň robot kebşirlemegiň 30% -e golaýyny düzýändigini görkezýär. Esasy funksiýa ýönekeý saklamakdan has giňdir; bölekleriň robot fakeline her gezek takyk programmirlenen koordinatlarda görkezilmegini üpjün edýär. Bu takyklyk, partiýalar üýtgän mahaly robot ýollaryny gymmat bahaly täzeden öwretmegiň zerurlygyny aradan aýyrýar.
Mundan başga-da, döwrebap enjamlar çaknyşmakdan gaça durmagy maksat edinýär. Olarda robot goluň çylşyrymly geometriýalara doly girmegine mümkinçilik berýän inçe profiller we strategiki kesişler bar. Öndürijiler “yşyklandyryjy” zawodlara tarap barýarka, enjamyň ygtybarlylygy robotyň özi ýaly möhüm bolýar.
Perokary öndürijilikli kebşirleýiş enjamlarynyň esasy komponentleri
Gurluşyň anatomiýasyna düşünmek dogry çözgüdi saýlamak üçin zerurdyr. Ygtybarly ulgam, özara täsirleşýän birnäçe elementden ybarat bolup, hersi umumy durnuklylyga we netijelilige goşant goşýar.
Esasy plastinka we gurluş bitewiligi
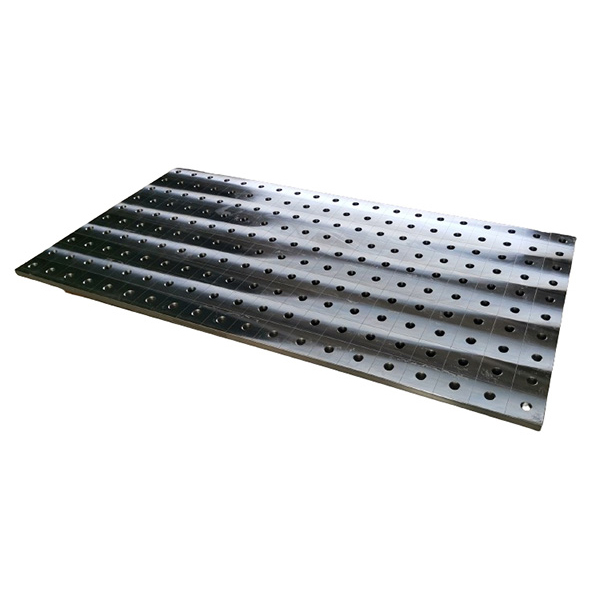
Islendik guralyň düýbi, adatça stresden halas edilen polatdan ýa-da alýumin erginlerinden ýasalan esasy plastinka. 2026-njy ýylda bazarda gözenek deşik nagyşlary (50mm ýa-da 100mm aralyk) modully esasy plitalar agdyklyk edýär. Bular täze duralgalary kebşirlemezden çäksiz konfigurasiýa etmäge mümkinçilik berýär.
Gurluş berkligi gysýan güýç astynda gaçmagyň öňüni alýar. Esasy egilse, kebşirleme tikişi üýtgeýär we kemçiliklere sebäp bolýar. Agyr ýükli amaly programmalar köplenç ýokary titremäni peseltmek üçin çoýun esaslaryny talap edýär, ýeňil howa giňişligi komponentleri anodlaşdyrylan alýumin gurnamalaryndan peýdalanýar. Çydamly gurallarda bu ewolýusiýa öňdebaryjy, Botou Haijun Metal Products Co., Ltd. Professional çoýun 3D kebşirleýiş platformalaryny we burç birikdiriji bloklary öndürip, özüni ynamdar üpjün ediji hökmünde görkezdi. Adatdan daşary berklige we durnuklylyga ygrarlylygy, her önümiň senagat önümlerini talap etmek üçin zerur gurluş bitewiligini üpjün etmegini üpjün edýär.
Basyş mehanizmleri we herekete getirijiler
El bilen üýtgetmek gysgyçlary pnewmatik we gidrawlik hereketlendirijiler bilen çalt çalşylýar. Bu hereketlendiriji gysgyçlar yzygiderli güýç berýär, operatoryň ýadawlygyny we üýtgemegini azaldýar. Ösen ulgamlar, robotyň arkasyna başlamazdan ozal bir böleginiň doly oturandygyny barlamak üçin basyş datçiklerini öz içine alýar.
- Pnewmatik gysgyçlar: Çalt aýlaw wagtlary we arassa gurşaw üçin amatly.
- Gidrawlik gysgyçlar: Uly saklaýyş güýjüni talap edýän agyr tabaklar üçin zerur.
- Servo-elektrik gysgyçlary: Näzik ýygnaklar üçin programmirläp bolýan güýç profillerini hödürlemek.
Nokatlary we duralgalary tapmak
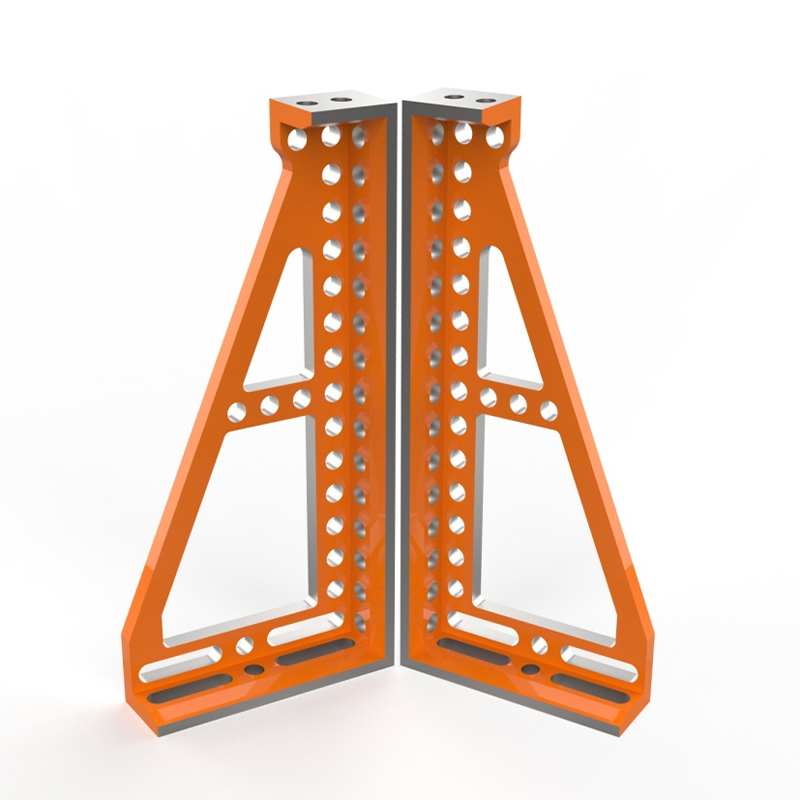
Takyk ýerleşiş gatylaşdyrylan polat gysgyçlar we sazlap bolýan duralgalar arkaly gazanylýar. Bu komponentler iş böleginiň X, Y we Z koordinatlaryny kesgitleýär. “3-2-1” ýerleşdiriş ýörelgesini ulanmak, bölekleriň ýoýulmagyna sebäp bolup biljek aşa çäklendirmesiz erkinligiň ähli derejelerinde çäklendirilmegini üpjün edýär.
Volumeokary göwrümli ssenariýalarda, çalt çykarmak operatorlara lokatorlary sekuntda çalyşmaga rugsat beriň. Bu modullyk, dürli ulag çarçuwalary ýa-da gurluş şöhleleri yzygiderli kebşirlenýän garyşyk model önümçilik liniýalaryny goldaýar. Şeýle çalt konfigurasiýany ýeňilleşdirmek üçin Botou Haijun ýaly kompaniýalar U görnüşli we L görnüşli köp maksatly kwadrat gutular, 200 seriýaly goldaw burç ütükleri we 0-225 ° uniwersal burç ölçegleri ýaly goşmaça komponentleriň giň toplumyny hödürleýärler. Bu garnituralar çalt iş ýerini ýerleşdirmäge we gysmaga mümkinçilik berýän çeýe platformalar bilen üznüksiz birleşýär, dükanlara iň az iş wagty bilen iş ýerlerini üýtgetmäge mümkinçilik berýär.
Robot kebşirleýiş gurallarynyň görnüşleri: Giňişleýin deňeşdirme
Gurluşyň dogry görnüşini saýlamak önümçiligiň göwrümine, bölekleriniň dürlüligine we býudjet çäklendirmelerine baglydyr. 2026-njy ýylda bazar üç aýratyn kategoriýany hödürleýär, hersiniň aýratyn artykmaçlyklary bar.
| Gurluşyň görnüşi | Iň gowusy | Gurnama wagty | Başlangyç bahasy | Çeýeligi |
| Bagyşlanan gaty gural | Volumeokary göwrümli köpçülikleýin önümçilik | Pes (bir gezek gurlan) | Beýik | Pes (Parteke bölek) |
| Modully gurnama | Orta göwrüm, köp SKU | Orta | Orta | Beýik |
| Çeýe ýumşak gural | Prototip ýazmak, gözleg we gözleg, pes ses | Çalt | Pes | Örän ýokary |
Bagyşlanan gaty gural millionlarça birmeňzeş birlikleri işleýän awtoulag gurnama liniýalary üçin altyn standart bolup galýar. Dizaýn we öndürmek üçin gymmat bolsa-da, iň çalt sikl wagtlaryny we iň ýokary gaýtalanmagyny hödürleýärler. Şeýle-de bolsa, önümiň dizaýny üýtgese, könelýär.
Modully gurnama ulgamlar bölünip bilinmeýän we tertipleşdirilip bilinýän standartlaşdyrylan komponentleri ulanýarlar. Bu çemeleşme, dürli şertnamalary baglaşýan iş dükanlary üçin eýeçiligiň umumy bahasyny ep-esli azaldar. Gurluşy bir gijede täzeden düzmek ukyby uly bäsdeşlik artykmaçlygydyr. Bu ýerde ýöriteleşen, Botou Haijun Metal Products Co., Ltd. ýokary takyklykly çeýe modully gurallaryň gözlegine, işlenip düzülmegine we önümçiligine ünsi jemleýär. Meşhur 2D we 3D çeýe kebşirleýiş platformalaryny öz içine alýan esasy önüm liniýasy, köp taraplylygy we takyklygy sebäpli gaýtadan işleýän, awtoulag we howa giňişliginde ileri tutulýan enjamlara öwrüldi.
Çeýe ýumşak gural, köplenç uniwersal setde sazlanylýan gysgyçlary öz içine alýan, bir gezeklik prototipler üçin ajaýyp. Has uzyn gurnama barlagy sebäpli ýokary tizlikli önümçilik üçin amatly bolmasa-da, ýörite in engineeringenerçilik zerurlygyny bütinleý ýok edýär.
2026-njy ýylda iň soňky baha tendensiýalary we çykdajy faktorlary
Bahasy robot kebşirleýiş enjamlary çylşyrymlylygyna, materiallaryna we awtomatlaşdyryş derejesine baglylykda giňden üýtgeýär. Çykdajy sürüjilerine düşünmek alyjylara netijeli býudjet etmäge we gizlin çykdajylardan gaça durmaga kömek edýär.
Giriş derejeli modul toplumlary
Awtomatlaşdyryşa girýän kiçi kärhanalar üçin esasy modul toplumlary 2000-den 5000 dollar aralygynda başlaýar. Bulara adatça adaty esasy plastinka, el gysgyçlar toplumy we esasy lokatorlar girýär. Simpleönekeý ýaýly kebşirlemek üçin ýeterlik, ýöne agressiw önümçilik maksatlary üçin zerur tizlik ýok.
Orta aralyk ýarym awtomatlaşdyrylan ulgamlar
Öndürijileriň köpüsi üçin iň ýakymly ýer 10,000-den 25,000 dollar aralygynda. Bu gurallar pnewmatik gysgyçlary, iki stansiýaly paletleri we howpsuzlyk birikmelerini öz içine alýar. Iki stansiýaly dizaýn operatorlara bir tarapy ýüklemäge mümkinçilik berýär, robot beýleki tarapyny kebşirleýär we öndürijiligi iki esse ýokarlandyrýar.
Bu nyrhda garaşyp bilersiňiz ISO-a laýyk howpsuzlyk zynjyrlary gysgyç ýapylmadyk bolsa, robotyň işlemeginiň öňüni alýar. Bu integrasiýa ätiýaçlandyryş borçnamalaryny azaldýar we iş ýeriniň howpsuzlygyny ýokarlandyrýar.
Endokary derejeli ýöriteleşdirilen çözgütler
Ekskawator bombalary ýa-da tirkeg çarçuwalary ýaly çylşyrymly gurnamalar, köplenç 50,000-den 100,000 $ aralygyndaky ýöriteleşdirilen enjamlary talap edýär. Bu ulgamlara gidrawliki aýlanýan pozisiýalar, serw bilen dolandyrylýan oklar we bölekleýin barlamak üçin toplumlaýyn görüş ulgamlary girip biler.
Bu ýerdäki çykdajy diňe bir enjamlary däl, eýsem simulýasiýa we çaknyşma derňewine sarp edilen in engineeringenerçilik sagatlaryny görkezýär. Endokary derejeli gurallara maýa goýmak, has az heläkçilik sebäpli döwülen nyrhlaryň peselmegi we robot ömrüniň uzalmagy bilen öwezini dolýar.
Göz öňünde tutmaly gizlin çykdajylar
Etiketkanyň bahasyndan başga, alyjylar tehniki hyzmat we sarp edilýän zatlar üçin hasabat bermeli. Berkidiji ýassyklar könelýär we birnäçe aýdan çalyşmaly. Howa liniýalary peselýär we datçikler süýşýär. Bejeriş üçin her ýyl başlangyç satyn alyş bahasynyň 5-10% paýlamak uzak möhletli ygtybarlylygy üpjün edýär.
Netijeli guraly dizaýn etmek üçin ädimme-ädim gollanma
Gurluşy dizaýn etmek, elýeterliligi, durnuklylygy we ergonomikany deňleşdirýän yzygiderli bir prosesdir. Barlanan iş prosesine eýermek synag-ýalňyşlygy azaldýar we ýerleşdirmegi çaltlaşdyrýar.
- Kebşirleýiş çapyny derňäň: Kebşirleýiş tikişleriniň hemmesini, giriş burçlaryny we möhüm çydamlylygy kesgitläň. Fakel üçin haýsy ýüzleriň päsgelçiliksiz galmalydygyny kesgitläň.
- Ingerleşiş strategiýasyny kesgitläň: Durnukly we gaýtalanýan bölekdäki datum nokatlaryny saýlaň. Stres döretmezden hereketi çäklendirmek üçin 3-2-1 düzgünini ulanyň.
- Berkidiji nokatlary saýlaň: Ortionoýulmany azaltmak üçin gysgyçlary kebşirleýiş zolaklaryna ýakyn ýerleşdiriň, ýöne fakeliň päsgel bermezligi üçin ýeterlikdir. Berkidiji güýçleriň kebşirleýiş güýçlerine garşydygyna göz ýetiriň.
- CAD-daky model: Robot, fakel we periferiýa enjamlaryny öz içine alýan doly 3D gurnama dörediň. Elýeterliligini barlamak üçin çaknyşygy kesgitlemek simulýasiýalaryny işlediň.
- Spatter goragyny goşuň: Galkanlary dizaýn ediň ýa-da bölekleriň ýerleşişini üýtgedip bilýän dökülmeleriň döremeginiň öňüni almak üçin ýaýyň golaýyndaky ýüzlerde keramiki örtükleri ulanyň.
- Gury ylgawlar bilen tassyklaň: Doly önümçilige başlamazdan ozal, aýlaw wagtyny we operatoryň ýüklemegiň aňsatlygyny barlamak üçin öýjügi bölek bölekleri bilen işlediň.
Bu gurluşly çemeleşme, soňky guralyň robotyň mümkinçiliklerini we operatoryň işini goldaýar. Simulýasiýa tapgyryndan geçmek, köplenç gurnandan soň gymmat bahaly dizaýnlara sebäp bolýar.
Umumy kynçylyklar we olary nädip ýeňip geçmeli
Hatda oňat dizaýn edilen enjamlar hem iş päsgelçilikleri bilen ýüzbe-ýüz bolýarlar. Bulary işjeň ýagdaýda çözmek ýokary geçiş we hil standartlaryny saklaýar.
Malylylyk ýoýulmasy
Kebşirlemek metalyň giňelmegine we gysylmagyna sebäp bolup, güýçli ýylylyk döredýär. Sowuklama wagtynda armatura bir bölegi gaty berk saklasa, galyndy stresler kebşäni döwüp ýa-da gurnamany çişirip biler. Çözüw ulanmagy öz içine alýar laýyk gysyş Sowadylanda ýa-da sowuk bloklary ulananda az hereket etmäge mümkinçilik berýän usullar, ýylylygyň çalt ýaýramagy.
Spatter toplamak
Wagtyň geçmegi bilen kebşirleýiş arassalaýjylary, täsirli ölçeglerini üýtgedip, lokatorlarda we gysgyçlarda gurulýar. Bu bölekleriň has ýokary oturmagyna ýa-da egilmegine sebäp bolup, robotyň çökmegine sebäp bolýar. Arassalaýyş tertibi hökmanydyr. Mundan başga-da, spaterlere garşy spreýleri ulanmak ýa-da lokatorlarda çalşylýan keramiki maslahatlary ulanmak bu meseläni ýeňilleşdirip biler.
Bölümiň üýtgemegi
Kesmek ýa-da egmek ýaly ýokary akymlar köplenç az ölçegli üýtgeşiklikleri öndürýär. Gaty gural bu bölekleri ret edip ýa-da ýoýulmagyna sebäp bolup biler. Goşmak öz-özüne gönükdirilen gysgyçlar ýa-da ýüzýän lokatorlar, möhüm kebşirleme deňligini saklamak bilen armatura ownuk üýtgeşiklikleri ýerleşdirmäge mümkinçilik berýär.
Senagat boýunça iň oňat programmalar
Köpugurlylygy robot kebşirleýiş enjamlary dürli pudaklarda aýrylmaz edýär. Her pudagyň aýratyn armatura dizaýnlaryny herekete getirýän özboluşly talaplary bar.
Awtoulag we ulag
Bu pudak iň ýokary tizligi we iň berk hil gözegçiligini talap edýär. Bu ýerdäki gurallar köplenç bir wagtda işleýän birnäçe robotly uly gantry ulgamlary öz içine alýar. Çalt üýtgeýän paletler, şol bir wagtyň özünde önümçilik modellerini goldaýan sedanlary bir sagat kebşirlemäge mümkinçilik berýär.
Agyr enjamlar we oba hojalygy
Traktorlary, ekskawatorlary we ýük göterijileri galyň tabaklar we uly gurluşlar bilen iş salyşýarlar. Bu domendäki enjamlar köpçülikleýin gysyş güýçlerini ileri tutýarlar we köplenç agyr gurnamalary aýlamak üçin pozisiýalary birleşdirýärler. Dükanyň berk şertlerine çydamlylyk birinji orunda durýar.
Aerokosmos we goranmak
Takyklyk howa giňişliginiň walýutasydyr. Uçar komponentleri üçin gurallar köplenç mikron derejesiniň takyklygyny saklamak üçin Invar ýa-da beýleki pes giňeldilen erginlerden ýasalýar. Gurluşlardaky RFID bellikleri, ulanylyş taryhyny we ýerine ýetiriş üçin tehniki hyzmat ýazgylaryny yzarlamak aýratynlyklary. Bu berk talaplary göz öňünde tutup, Botou Haijun ýaly hünärmenleriň hödürleýän takyklygy aýratyn gymmatlydyr; çeýe kebşirleýiş platformalary, häzirki zaman ýokary tehnologiýaly önümçilik üçin zerur we çeýe ýerleşiş çözgütlerini üpjün edip, howa giňişliginde ileri tutulýan enjam hökmünde dünýä derejesinde ykrar edilýär.
Umumy önümçilik we iş dükanlary
Dürli sargytlary ýerine ýetirýän dükanlar üçin modullyk möhümdir. Tor nagyşlary bilen uniwersal enjamlar çalt konfigurasiýa etmäge mümkinçilik berýär. Bu gurnamalar kiçi toparlara has köp iş wagty bolmazdan iş ýerlerini çalt üýtgetmek arkaly has uly guramalar bilen bäsleşmäge mümkinçilik berýär.
Geljekki tendensiýalar: Akylly armatura we senagat 4.0
2026-njy ýyla has çuňňur aralaşanymyzda, enjamlar birikdirilen zawodda akylly düwünlere öwrülýär. IoT datçikleriniň birleşmegi passiw gurallary maglumat çeşmelerine öwürýär.
Akylly gysgyçlar indi robot gözegçisine hakyky wagt ýagdaýyny habar beriň. Eger gysgyç doly basyşa ýetip bilmese, ulgam derrew saklanýar we kemçilikli kebşileriň öňüni alýar. Maglumat seljerişi, şowsuzlyk ýüze çykmazdan ozal tehniki hyzmatyň zerurlygyny çaklap, gysgyç sikliniň sanlaryny yzarlaýar.
Anotherene bir ýüze çykýan tendensiýa uýgunlaşdyrylan armatura. Maşyn görüşini ulanyp, robot ýüklenenden soň bölegi gözden geçirýär, hakyky ýagdaýyny kesgitleýär we kebşirleýiş ýoluny awtomatiki düzýär. Bu aşa takyk ýokary akym kesmek zerurlygyny azaldar we gurallaryň has ýönekeý we arzan bolmagyna mümkinçilik berýär.
Mundan başga-da, sanly ekiz enjamlar standart bolýar. Inersenerler fiziki önümçiligiň öň ýanyndaky dizaýnlary optimizirläp, könelmegi we ýyrtylmagy diýen ýaly simulýasiýa edýärler. Bu wirtual tassyklama ösüş siklini gysgaldýar we ilkinji gezek dogry nyrhlary gowulandyrýar.
Freygy-ýygydan soralýan soraglar (FAQ)
Robot kebşirleýji enjamlary näçe gezek barlamaly?
Volumeokary göwrümli öýjükler üçin hepdede yzygiderli barlag geçirilmeli. Boş boltlary, könelen lokator nokatlaryny we pytraňňy gurluşy barlaň. Positionagdaý takyklygynyň çydamlylygyň çäginde galmagyny üpjün etmek üçin çärýekde giňişleýin kalibrleme barlagy geçirilmelidir.
Robot öýjüginde el bilen gysgyçlary ulanyp bilerinmi?
Hawa, ýöne diňe howpsuzlyk datçikleri bilen enjamlaşdyrylan ýagdaýynda. Robot dolandyryjysy, başlamazdan ozal ähli el gysgyçlarynyň ýapylandygyny tassyklaýan signal almaly. Şeýle-de bolsa, el bilen gysgyçlar sikl wagtyny haýalladýar we operatoryň ýadawlygyny ýokarlandyrýar, bu bolsa ýokary önümçilik üçin has amatly bolýar.
Gurluş gurluşygy üçin haýsy material iň gowusy?
Stressden halas bolan uglerod polat, güýji we tygşytlylygy sebäpli umumy programmalar üçin iň köp ýaýran saýlawdyr. Poslaýjy gurşaw ýa-da reňkli kebşirlemek üçin poslamaýan polatdan ýa-da alýuminiý saýlanyp bilner. -Okary geýilýän ýerler gatylaşdyrylan gural polatdan ýasalanlary ulanmalydyr.
Täze guralyň ROI-ni nädip hasaplamaly?
Her sagatlyk zähmet we maşyn tizligi bilen köpeldilen bölek üçin sikl wagtynyň azalmagyny hasaplaň. Azaldylan galyndylardan tygşytlamak we gaýtadan işlemek. Netijeli dizaýnlar üçin adatça 12 aýdan az bolan öwezini dolmagyň möhletini kesgitlemek üçin bu ýyllyk tygşytlamalaryň umumy bahasyny bölüň.
Tekstden daşarda ýa-da adaty gurluşyk satyn almak gowumy?
Tekstden daşary modul ulgamlary dürli bölek garyndylary we pes sesleri üçin iň gowusydyr. Custörite gurlan gurallar, sikl wagtynyň her sekuntyny hasaplaýan ýokary göwrümli, aýratyn önümçilik liniýalary üçin zerurdyr. Köp kompaniýalar ýokary derejeli gurallar bilen modully esaslary ulanyp, gibrid çemeleşmäni kabul edýärler.
Netije we strategiki teklipler
The robot kebşirleýji gural ýönekeý eýesinden has kän; awtomatiki kebşirleýiş amallaryňyzyň hilini, tizligini we düşewüntliligini görkezýän takyk gural. 2026-njy ýylda ortaça we ajaýyp öndürijiligiň arasyndaky boşluk, gurnama strategiýaňyzyň çylşyrymlylygyndadyr.
Volumeokary göwrümli öndürijiler üçin aýratyn, datçikli integrirlenen gaty gurallara maýa goýmak, her bölegi üçin iň arzan bahany hödürleýär. Munuň tersine, iş dükanlary we prototip görnüşleri çeýeligi saklamak üçin modul ulgamlaryny ulanmalydyr. Saýlanan ýoluňyza garamazdan, elýeterliligi, ýylylyk dolandyryşyny we maglumatlary birikdirmegi ileri tutup, goýumlaryňyzy geljekde subut eder. Tejribeli öndürijiler bilen hyzmatdaşlygy halaýar Botou Haijun Metal Products Co., Ltd. möhüm artykmaçlygy berip biler; köp ýyllyk önümçilik tejribesi bilen, içerde we halkara derejede müşderilere netijeli çözgütleri yzygiderli ýetirip, ýokary hilli önümçilik enjamlary gurallary üçin ygtybarly çeşme bolup hyzmat edýär.
Indi kim hereket etmeli? Häzirki sikl wagtlaryňyz biri-birine gabat gelmeýän bolsa ýa-da bölek üýtgemegi sebäpli robotyňyz ýygy-ýygydan ýykylsa, enjamyňyzy barlamagyň wagty geldi. Döwrebap, akylly enjamlary döwrebaplaşdyrmak, täze enjam satyn almazdan, bar bolan robot öýjükleriňizdäki gizlin kuwwaty açyp biler.
Ara alnyp maslahatlaşylýan armatura görnüşlerine garşy häzirki önümçilik garyndyňyzy bahalandyryp indiki ädim ätiň. Maýa goýmazdan ozal ýörite programmaňyzy simulirlemek üçin tejribeli integratorlar bilen maslahatlaşyň. Dogry armatura çözgüdi şu gün ulalýan, ýokary hilli önümçilik üçin esas döredýär.