Hytaý robot kebşirleýiş armatura öndürijisi: Giňişleýin gollanma
Bu gollanma ýokary hilli gözleýän kärhanalar üçin çuňňur maglumat berýär Hytaý robot kebşirleýji armatura öndürijileri. Öndüriji saýlanylanda göz öňünde tutulmaly esasy faktorlary öwreneris, dürli enjamlary ara alyp maslahatlaşarys we kebşirleýiş amallaryňyzy optimizirlemek barada düşünje hödürläris. Önümçiligiň netijeliligini we önümiň hilini ýokarlandyrmak üçin ajaýyp hyzmatdaş tapmagyň usullaryny öwreniň.
Dogry saýlamak Hytaý robot kebşirleýji armatura öndürijisi
Kebşirleýiş zerurlyklaryňyza düşünmek
Gözlegiňize başlamazdan ozal Hytaýda robot kebşirleýji armatura öndürijisi, kebşirleýiş talaplaryňyza doly baha beriň. Kebşirlenýän metalyň görnüşi, ulanylýan kebşirleme prosesi (MIG, TIG, spot kebşirlemek we ş.m.), önümçiligiň göwrümi we islenýän takyklyk we gaýtalanma derejesi ýaly faktorlara serediň. Bu zerurlyklary anyk kesgitlemek gözlegiňizi ep-esli çäklendirer we aýratynlyklaryňyza laýyk gelýän öndürijileri kesgitlemäge kömek eder.
Öndürijiniň mümkinçiliklerine baha bermek
Öndürijileriň hemmesi deň derejede döredilenok. A saýlanyňyzda Hytaýda robot kebşirleýji armatura öndürijisi, subut edilen yz ýazgysy, robot kebşirleýiş proseslerine berk düşünmek we önümçilik mukdaryny dolandyrmak ukyby bolan kompaniýalary gözläň. Factorsaly faktorlara serediň:
- Specificörite kebşirleýiş programmaňyz bilen tejribe
- Dizaýn mümkinçilikleri we özleşdirmek opsiýalary
- Hil gözegçiligi çäreleri we şahadatnamalar (meselem, ISO 9001)
- Gurşun wagty we önümçilik kuwwaty
- Satuwdan soň goldaw we tehniki kömek
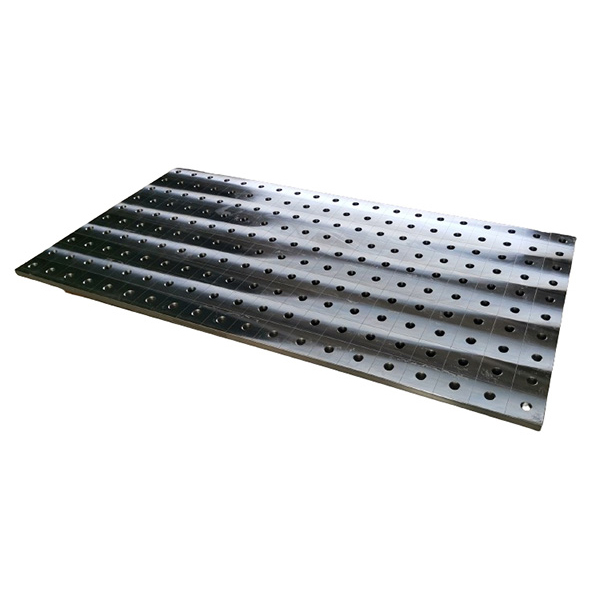
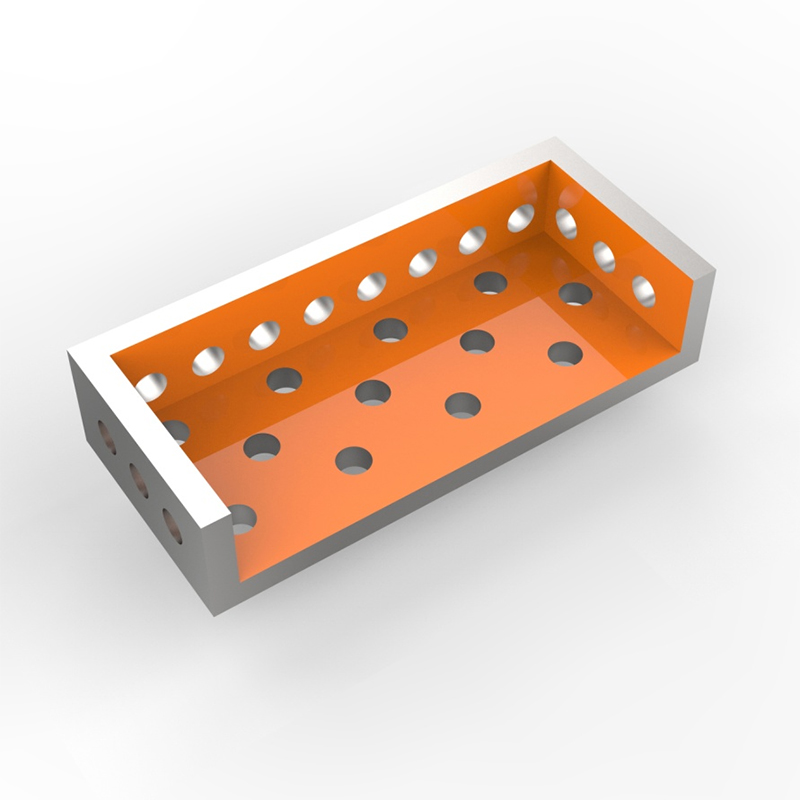
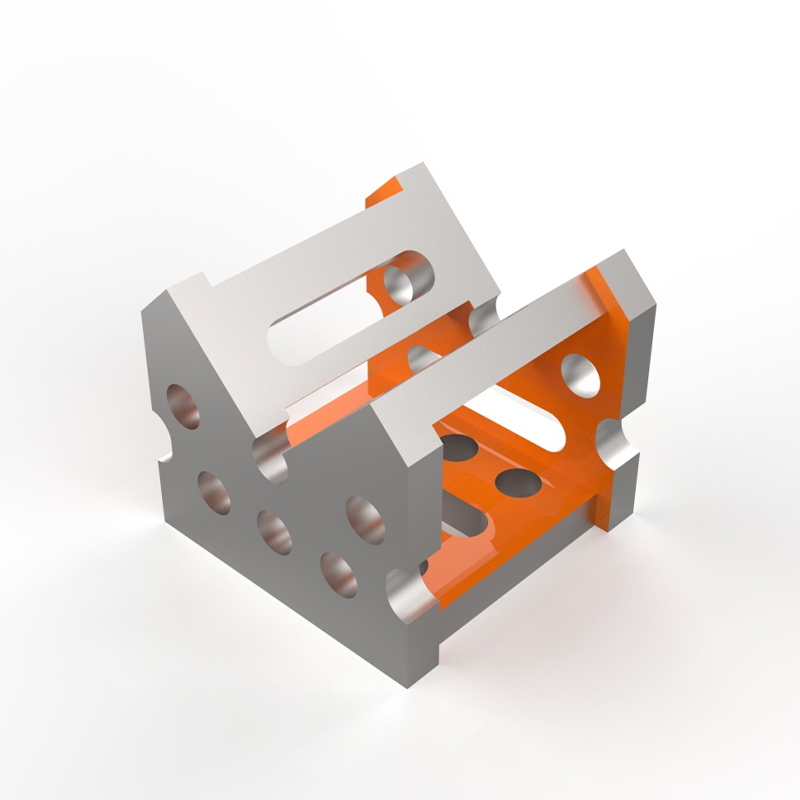
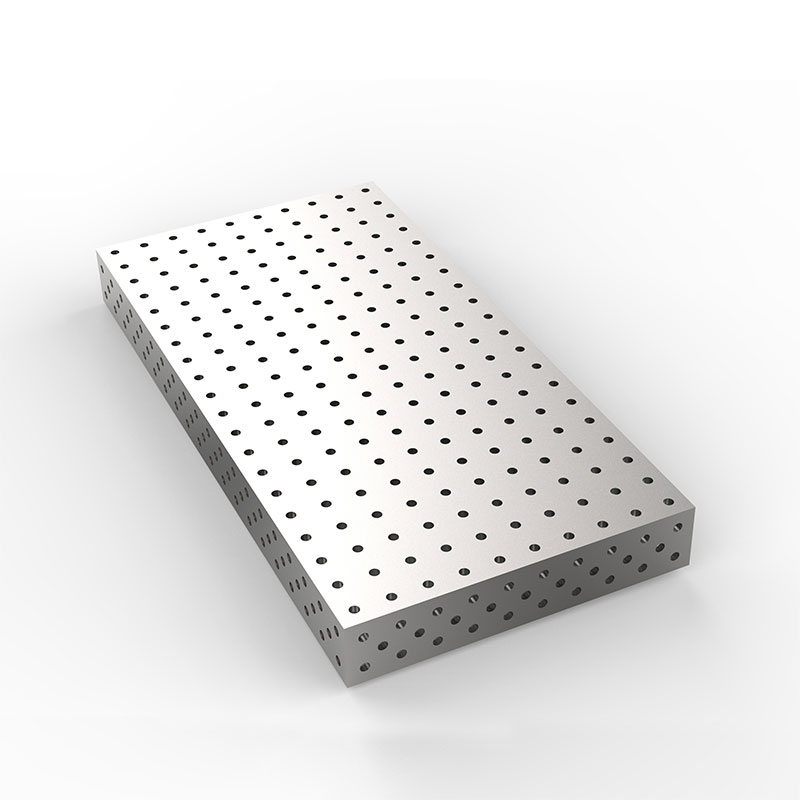
Robot kebşirleýiş enjamlarynyň görnüşleri
Robot kebşirleýiş enjamlary dürli dizaýnlarda bolup, hersi aýratyn programmalara laýyk gelýär. Adaty görnüşler:
- Modully enjamlar: Dürli bölekler üçin çeýeligi we uýgunlaşmagy teklip ediň.
- Bagyşlanan gurallar: Bir bölek ýa-da çäkli bölekler üçin niýetlenendir.
- Agyrlyk enjamlary: Iş bölegini ýerinde saklamak üçin agyrlyk güýjüni ulanyň.
- Gysgyç enjamlary: Iş bölegini berkitmek üçin gysgyç mehanizmlerini ulanyň.
Gurluş görnüşini saýlamak bölek çylşyrymlylygy, önümçiligiň mukdary we býudjet ýaly faktorlara baglydyr.
Hyzmatdaşlyk üçin esasy pikirler Hytaý robot kebşirleýji armatura öndürijileri
Aragatnaşyk we hyzmatdaşlyk
Netijeli aragatnaşyk, ilkinji dizaýn çekişmelerinden başlap, ahyrky önümiň eltilmegine çenli ähli prosesde möhümdir. Saýlanan öndürijiňiz bilen anyk we yzygiderli aragatnaşyk kanallarynyň döredilendigine göz ýetiriň. Taslamanyň tizligini saklamak we soňky önümiň talaplaryňyza laýyk gelmegini üpjün etmek üçin yzygiderli täzelenmeler we seslenmeler zerurdyr.
Hil gözegçiligi we gözegçilik
Önümçilik prosesinde yzygiderli barlaglary we synaglary goşmak bilen, ýokary hilli gözegçilik çärelerini ýerine ýetiriň. Bu kemçilikleriň öňüni almaga we gurallaryň zerur talaplara laýyk gelmegine kömek eder. Düşünişmezliklerden gaça durmak üçin hiliň gözegçilik protokollaryny öndüriji bilen maslahatlaşyň.
Bahalar we töleg şertleri
Özüňiz bilen düşnükli we aýdyň bahalar we töleg şertleri barada gepleşik geçiriň Hytaýda robot kebşirleýji armatura öndürijisi. Taslama tölegleri, maddy çykdajylar, önümçilik çykdajylary we ýük daşama çykdajylary ýaly ähli çykdajylara düşüniň. Iki tarapy hem goraýan töleg tertibini düzüň.
Ygtybarly tapmak Hytaý robot kebşirleýji armatura öndürijileri
Birnäçe onlaýn platformalar we önümçilik kataloglary abraýly ýerleri tapmaga kömek edip biler Hytaý robot kebşirleýji armatura öndürijileri. Potensial öndürijileri düýpli gözläň, synlary okaň we karar bermezden sitatalary deňeşdiriň. Ygtybarly we ygtybarly üpjün ediji bilen hyzmatdaşlygy üpjün etmek üçin zerur yhlas möhümdir. Amallaryna öz gözüňiz bilen görmek üçin mümkin bolsa öndürijiniň desgasyna baryp görmegi göz öňünde tutuň. Qualityokary hilli robot kebşirleýiş enjamlary üçin habarlaşmagy göz öňünde tutuň Botou Haijun Metal Products Co., Ltd., Hytaýda öňdebaryjy öndüriji. Olaryň tejribesi we hiline bolan ygrarlylygy, olary kebşirlemek zerurlyklary üçin gymmatly hyzmatdaş edýär.
Robot kebşirleýiş amalyňyzy optimizirlemek
Gurluş dizaýnyny optimizasiýa
Kebşirleýiş enjamyňyzyň dizaýny, robot kebşirleýiş işiňiziň netijeliligine we hiline ep-esli derejede täsir edýär. Özüňiz bilen ýakyndan işleşiň Hytaýda robot kebşirleýji armatura öndürijisi maksimum netijelilik we gaýtalanmak üçin armatura dizaýnyny optimizirlemek.
Programmirlemek we gurmak
Dogry we yzygiderli kebşirlemek üçin robot kebşirleme ulgamyňyzy dogry programmirlemek we gurnamak möhümdir. Saýlanan öndürijiňiziň robot kebşirleme ulgamynyň we gurallarynyň programmirlemegi we integrasiýasy bilen goldaw berýändigine göz ýetiriň.
| Aýratynlyk | Wariant A. | B warianty |
| Material | Polat | Alýumin |
| Takyklyk | ± 0.1mm | ± 0.2mm |
| Gurşun wagty | 4 hepde | 6 hepde |
Dogry saýlaň Hytaýda robot kebşirleýji armatura öndürijisi robot kebşirleme amallaryňyzy optimizirlemekde möhüm ädimdir. Aboveokarda görkezilen faktorlary üns bilen gözden geçirip, üstünlikli hyzmatdaşlygy üpjün edip, önümçiligiň netijeliliginde we önümiň hilinde ep-esli gowulaşma gazanyp bilersiňiz.