Hytaý robot kebşirleýiş enjamy: Giňişleýin gollanma
Bu gollanma çuňňur çümmegi üpjün edýär Hytaýda robot kebşirleýiş enjamlary, üstünlikli durmuşa geçirmek üçin dizaýn pikirlerini, saýlama ölçeglerini, umumy görnüşlerini we iň oňat tejribelerini öz içine alýar. Robotly kebşirleme programmaňyz üçin armatura saýlanyňyzda, netijeliligi we hilini optimizirlemäge kömek etjek esasy faktorlary öwreneris. Dogry guralyň önümçilik prosesine we umumy girdejililigine nähili täsir edip biljekdigini öwreniň.
Robot kebşirleýiş enjamlaryna düşünmek
Robot kebşirleýiş enjamy näme?
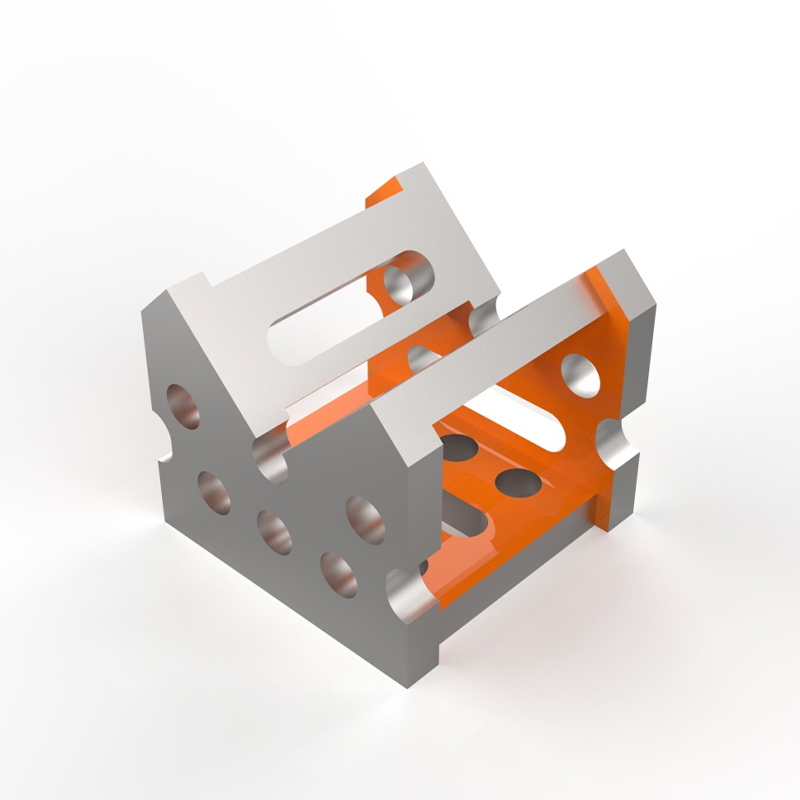
A robot kebşirleýji gural robot kebşirleýiş döwründe iş böleklerini saklamak we takyk ýerleşdirmek üçin döredilen ýöriteleşdirilen enjam. Bu gurallar el bilen işlemegiň zerurlygyny aradan aýyrýan we adam ýalňyşlygynyň töwekgelçiligini azaldýan kebşirlemegiň hilini, gaýtalanmagyny we howpsuzlygyny üpjün edýär. Gurluşyň saýlanylmagy, aýratyn ulanyşa, iş geometriýasyna we kebşirleýiş parametrlerine baglydyr. Maddy görnüşi, kebşirlenen bilelikdäki dizaýn we önümçilik göwrümi ýaly faktorlar degişli guraly saýlamakda möhüm rol oýnaýar.
Robot kebşirleýiş enjamlarynyň görnüşleri
Birnäçe görnüşi Hytaýda robot kebşirleýiş enjamlary dürli programmalara laýyk gelýär. Bular öz içine alýar:
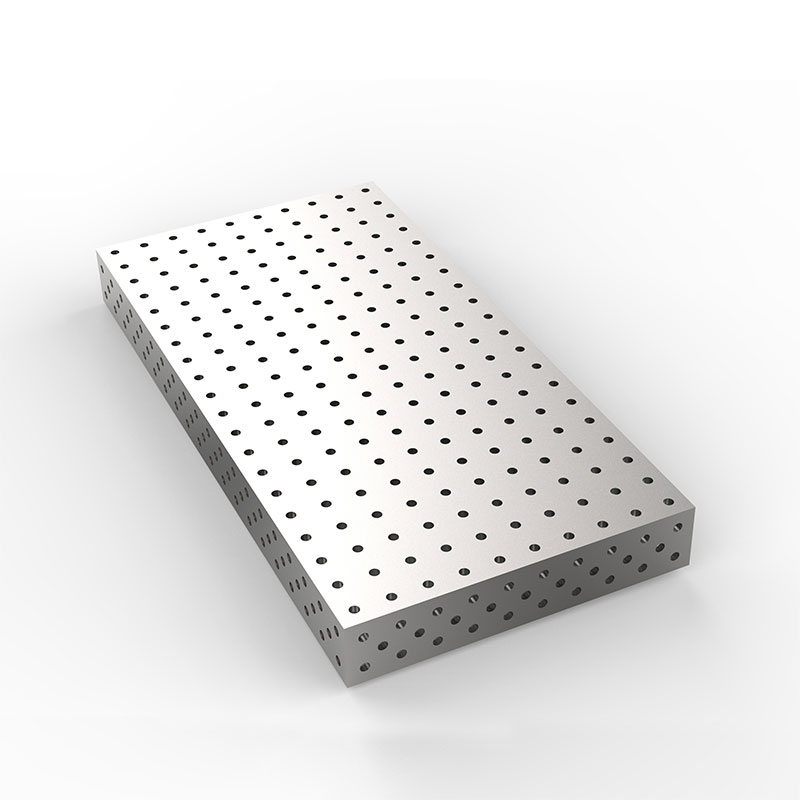
- Jigler: Iş bölegini saklamak we ýerleşdirmek üçin ulanylýan ýönekeý gurallar.
- Gysgyçlar: Iş bölegini berk saklaýan enjamlar.
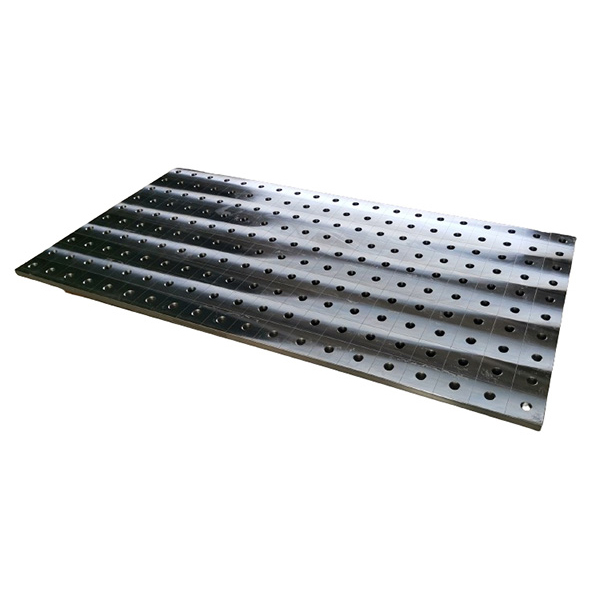
- Modully enjamlar: Dürli bölekler üçin çalt gurnamaga we konfigurasiýa etmäge mümkinçilik berýän köpugurly ulgamlar.
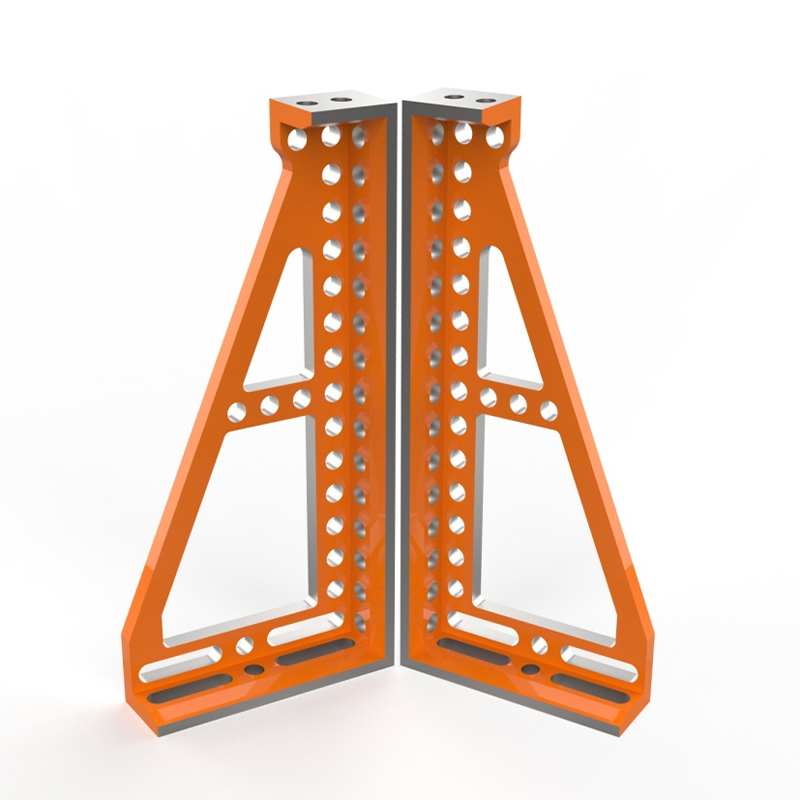
- Omörite düzülen gurallar: Çylşyrymly iş bölekleri we kebşirlemegiň aýratyn talaplary üçin ýörite çözgütler.
Saýlaw, işiň çylşyrymlylygy, önümçiligiň göwrümi we zerur takyklyk ýaly faktorlara baglydyr.
Dogry robot kebşirleýiş enjamyny saýlamak
Göz öňünde tutmaly faktorlar
A saýlanylanda birnäçe möhüm faktorlar ünsli garalmalydyr Hytaýda robot kebşirleýji gural:
- Iş bölegi Geometriýa: Iş eseriniň görnüşi we ululygy guralyň dizaýnyny we çylşyrymlylygyny görkezýär.
- Kebşirleýiş prosesi: Dürli kebşirleýiş amallary (meselem, MIG, TIG, ýer bilen kebşirlemek) ýörite gurnama dizaýnlaryny talap edip biler.
- Material görnüşi: Iş bölegi materialyň armaturasynyň material saýlanyşyna we gysyş mehanizmlerine täsir edýär.
- Önümiň göwrümi: Volumeokary göwrümli önümçilik has çylşyrymly we awtomatlaşdyrylan enjamlara maýa goýumlaryny esaslandyryp biler.
- Takyklyk we gaýtalanma: Gurluşyň kebşiniň hilini saklamak üçin takyk ýerleşişini üpjün etmeli.
- Elýeterlilik: Gurluş robot we kebşirleýji fakel üçin aňsat girmäge mümkinçilik bermeli.
Dizaýn pikirleri
Netijeli robot kebşirleýji gural dizaýn iň amatly öndürijilik üçin möhümdir. Esasy pikirler şulary öz içine alýar:
- Ygtybarlylyk we durnuklylyk: Kebşirleýiş wagtynda emele gelen güýçlere garşy durmak üçin armatura ýeterlik derejede berk bolmaly.
- Kebşirlemek üçin elýeterlilik: Dizaýn, kebşirleýiş roboty üçin päsgelçiliksiz girmäge mümkinçilik bermeli.
- Adingüklemegiň we düşürmegiň aňsatlygy: Netijeli ýüklemek we düşürmek proseduralary iş wagty azaldýar.
- Çydamlylygy we tehniki hyzmaty: Gurluş uzak möhletli ulanmak we aňsat hyzmat etmek üçin dizaýn edilmelidir.
Robot kebşirleýiş enjamlaryny ulanmagyň artykmaçlyklary
Highokary hilli durmuşa geçirmek Hytaýda robot kebşirleýiş enjamlary möhüm artykmaçlyklary hödürleýär, şol sanda:
- Kebşirleýişiň hili gowulaşdy: Bölekleýin ýerleşdirilmegi kebşirlemegiň ýokary hiline we gaýtalanmagyna getirýär.
- Önümçiligiň ýokarlanmagy: Awtomatlaşdyryş sikl wagtyny gysgaldýar we umumy geçirijiligi ýokarlandyrýar.
- Giňeldilen howpsuzlyk: El bilen işlemegiň zerurlygyny aradan aýyrýar, iş ýerinde şikes ýetmek howpuny azaldýar.
- Zähmet çykdajylarynyň azalmagy: Awtomatlaşdyryş el zähmetine garaşlylygy peseldýär.
- Amallaryň netijeliligini ýokarlandyrmak: Düzgünli prosesler önümçilik wagtyny we galyndylaryny azaldýar.
Hytaý robot kebşirleýiş enjamlarynyň ygtybarly üpjün edijilerini tapmak
Abraýly üpjün edijini saýlamak, ýokary hilli almak üçin möhümdir Hytaýda robot kebşirleýiş enjamlary. Barlanan tejribesi, berk ýazgysy we müşderi hyzmatyna ygrarlylygy üpjün edijileri gözläň. Önümçilik mümkinçilikleri, hil gözegçiligi we satuwdan soňky goldaw ýaly faktorlara serediň. Qualityokary hilli metal önümleri we enjamlary üçin Hytaýda tejribeli öndürijilerden gözleg usullaryny göz öňünde tutuň. Şeýle öndürijileriň biri Botou Haijun Metal Products Co., Ltd.takyklygy we hili bilen tanalýar.
| Aýratynlyk | Qualityokary hilli armatura | Pes hilli armatura |
| Takyklyk | ± 0.05mm | ± 0.2mm |
| Material | Güýçli polat | Ildumşak polat |
| Çydamlylyk | Uzak ömri, minimal tehniki hyzmat | Gysga ömri, ýygy-ýygydan hyzmat etmek |
Dogry saýlaň Hytaýda robot kebşirleýji gural robot kebşirleýiş amalyny optimizirlemek üçin örän möhümdir. Aboveokarda ara alnyp maslahatlaşylan ähli faktorlary düýpli meýilleşdirmek we gözden geçirmek, üstünlikli durmuşa geçirilmegine we önümçiligiň gowulaşmagyna goşant goşar.