Netijeli robot kebşirleýiş enjamlaryny taslamak we durmuşa geçirmek
Bu giňişleýin gollanma dizaýn etmegiň we durmuşa geçirmegiň möhüm taraplaryny öwrenýär robot kebşirleýiş enjamlarynetijeliligini we kebşirlemegiň hilini ýokarlandyrmak üçin amaly maslahatlar we düşünjeler bermek. Armatura dizaýn pikirleri, material saýlamak, umumy armatura görnüşleri we robot kebşirleýiş ulgamyňyz bilen integrasiýa üçin iň oňat tejribeler barada öwreniň. Şeýle hem, uzak möhletli öndürijiligi we maýa goýumlaryny yzyna gaýtarmak üçin dogry hyzmat etmegiň we näsazlyklary düzetmegiň ähmiýetini öwreneris.
Robot kebşirleýiş enjamlarynyň ähmiýetine düşünmek
Näme üçin robot kebşirlemekde gurallary ulanmaly?
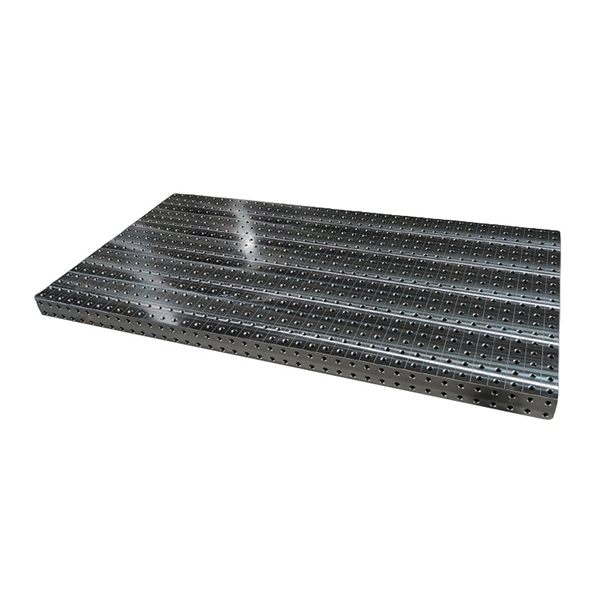
Robot kebşirleýiş enjamlary Awtomatiki kebşirleýiş işlerinde yzygiderli, ýokary hilli kebşirlemek üçin zerurdyr. Kebşirleýiş işinde takyk bölek ýerleşişini üpjün edýärler we iş bölegini ygtybarly saklaýarlar. Bu el bilen işlemekden döreýän gapma-garşylyklary aradan aýyrýar we gaýtalanýan takyklygy üpjün edýär, kebşirlemegiň hiliniň gowulaşmagyna, galyndylaryň peselmegine we öndürijiligiň ýokarlanmagyna getirýär. Dogry armatura dizaýny, robot kebşirleýiş ulgamyňyzyň umumy netijeliligine we düşewüntliligine gönüden-göni täsir edýär.
Robot kebşirleýiş enjamlaryny ulanmagyň esasy artykmaçlyklary
Netijeli durmuşa geçirmek robot kebşirleýiş enjamlary birnäçe möhüm artykmaçlygy hödürleýär:
- Kebşirleýişiň hili gowulaşdy: Bölekleýin ýerleşdirilmegi kebşiň birmeňzeş aralaşmagyny üpjün edýär we kemçilikleri azaldýar.
- Önümçiligiň ýokarlanmagy: Awtomatiki usulda işlemek we takyk kebşirlemek sebäpli has çalt aýlaw wagty.
- Gyrylan nyrhlar: yzygiderli kebşirlemegiň hili ret edýär we gaýtadan işleýär.
- Giňeldilen howpsuzlyk: Awtomatiki usulda işlemek işçiniň şikes alma howpuny peseldýär.
- Gowulaşan gaýtalanma: Gurluşlar köp böleklerde yzygiderli kebşirleme parametrlerini üpjün edýär.
Netijeli robot kebşirleýiş enjamlaryny dizaýn etmek
Gurluş dizaýn pikirleri
Netijeli robot kebşirleýji gural dizaýn birnäçe faktorlara ünsli garamagy talap edýär:
- Bölüm geometriýasy: Iş böleginiň görnüşi we ululygy armatura dizaýnyny görkezýär.
- Kebşirleýiş prosesi: Kebşirleýiş işiniň görnüşi (meselem, MIG, TIG, ýer bilen kebşirlemek) armatura talaplaryna täsir edýär.
- Robot mümkinçilikleri: Robotyň ýetilişi, ýük göterijiligi we tizligi göz öňünde tutulmalydyr.
- Material saýlamak: Gurluş materialy güýçli, çydamly we kebşirleýiş işine laýyk bolmalydyr.
- Elýeterlilik: Gurluş robotyň ähli kebşirleýiş nokatlaryna aňsatlyk bilen girmegine mümkinçilik bermeli.
- Çykdajylaryň netijeliligi: Funksiýany çykdajy bilen deňleşdirmek gaty möhümdir.
Gurluşlaryňyz üçin dogry materiallary saýlamak
Size laýyk materiallary saýlamak robot kebşirleýiş enjamlary uzak ömri we öndürijiligi üçin möhümdir. Umumy saýlawlar polat, alýumin we çoýun demirlerini öz içine alýar, olaryň hersi özboluşly aýratynlyklary hödürleýär. Polat ýokary güýç we berklik hödürleýär, alýumin ýeňil çözgütler bilen üpjün edýär. Döküm demir köplenç ajaýyp nemlendiriji mümkinçilikleri üçin ulanylýar. Saýlaw, aýratyn ulanyşa we kebşirleýiş prosesiniň talaplaryna baglydyr. Materiallar boýunça hünärmen bilen maslahatlaşmak, taslamaňyz üçin iň amatly materialy kesgitlemäge kömek edip biler. Habarlaşyň Botou Haijun Metal Products Co., Ltd. material saýlamakda hünärmen kömegi üçin.
Robot kebşirleýiş enjamlarynyň görnüşleri
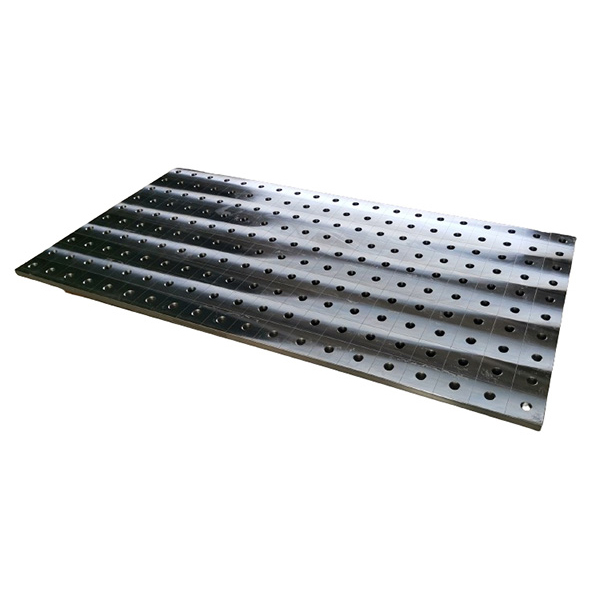
Umumy armatur dizaýnlary
Dürli robot kebşirleýji gural dizaýnlary dürli zerurlyklary kanagatlandyrýar. Bular öz içine alýar:
- Bagyşlanan gurallar: Bir bölek görnüşi üçin niýetlenendir.
- Köp bölümli gurluşlar: Birnäçe bölek üýtgeýişlerini ýerleşdiriň.
- Modully enjamlar: Dürli bölekleri dolandyrmak üçin aňsat konfigurasiýa etmäge mümkinçilik beriň.
- Çalt üýtgeýän gurluşlar: Dürli bölekleriň arasynda çalt üýtgemeleri işjeňleşdiriň.
Gurluşy gysmak mehanizmleri
Ygtybarly gysyş mehanizmleri ygtybarly bölegi saklamak üçin möhümdir. Umumy usullar şulary öz içine alýar:
- Mehaniki gysgyçlar: Köp programmalar üçin ýönekeý we täsirli.
- Pnewmatik gysgyçlar: Has çalt gysyş tizligini we takyk dolandyryşy teklip ediň.
- Gidrawlik gysgyçlar: ýokary gysyjy güýçler bilen üpjün ediň.
- Wakuum gysgyçlary: Näzik ýa-da aňsat zaýalanan bölekler üçin amatly.
Robot kebşirleýiş enjamlaryny durmuşa geçirmek we goldamak
Robot ulgamlary bilen armatura integrasiýasy
Birleşmek robot kebşirleýiş enjamlary robot kebşirleýiş ulgamyňyza seresaply meýilleşdirmegi we ýerine ýetirmegi talap edýär. Bu robot bilen armatura bilen täsirleşmegi, dogry aragatnaşyk protokollaryny üpjün etmegi we howpsuzlyk çärelerini durmuşa geçirmegi öz içine alýar. Takyk kalibrleme bölekleriň takyk ýerleşmegi we kebşirlemegiň yzygiderli hili üçin zerurdyr.
Bejeriş we näsazlyklary düzetmek
Ömrüňi uzaltmak we iň amatly öndürijiligini üpjün etmek üçin yzygiderli tehniki hyzmat etmek möhümdir robot kebşirleýiş enjamlary. Bu könelmegi we ýyrtylmagyny, hereket edýän bölekleri ýaglamagy, zeper ýeten bölekleri çalt bejermek ýa-da çalyşmagy öz içine alýar. Meseleleri ir ýüze çykarmak we çözmek gaty arzan iş wagtynyň öňüni alyp biler we kebşirlemegiň hilini üpjün edip biler.
Netije
Netijeli dizaýn we durmuşa geçirmek robot kebşirleýiş enjamlary robot kebşirleýiş ulgamyňyzyň netijeliligini we öndürijiligini ýokarlandyrmak üçin örän möhümdir. Bu gollanmada ara alnyp maslahatlaşylan faktorlary üns bilen gözden geçirip, enjamlaryňyzyň kebşirleýiş hiliniň gowulaşmagyna, galyndylaryň peselmegine we umumy girdejiligini ýokarlandyrmagyna goşant goşup bilersiňiz. Gurluş dizaýnyny we durmuşa geçiriş strategiýasyny optimizirlemek üçin hünärmenler bilen maslahatlaşmagy we bar bolan çeşmeleri ulanmagy ýatdan çykarmaň.
tablisa {ini: 700px; margin: 20px awto; serhet-çökmek: ýykylmak;} th, td {araçäk: 1px gaty #ddd; gaplamak: 8px; text-align: left;} th {background-color: # f2f2f2;}