Kompreni kaj Utiligi Tri-Dimensiajn Flekseblajn Okangulajn Platformojn
Ĉi tiu ampleksa gvidilo esploras la dezajnon, aplikojn kaj konsiderojn por tridimensiaj flekseblaj okangulaj platformoj. Ni enprofundiĝas en la ĉefajn funkciojn, avantaĝojn kaj eblajn defiojn asociitajn kun ĉi tiuj specialigitaj platformoj, proponante komprenojn por inĝenieroj, projektistoj kaj ĉiuj, kiuj volas kompreni ilian funkciecon kaj potencialon.
Kio estas Tri-Dimensia Fleksebla Okangula Platformo?
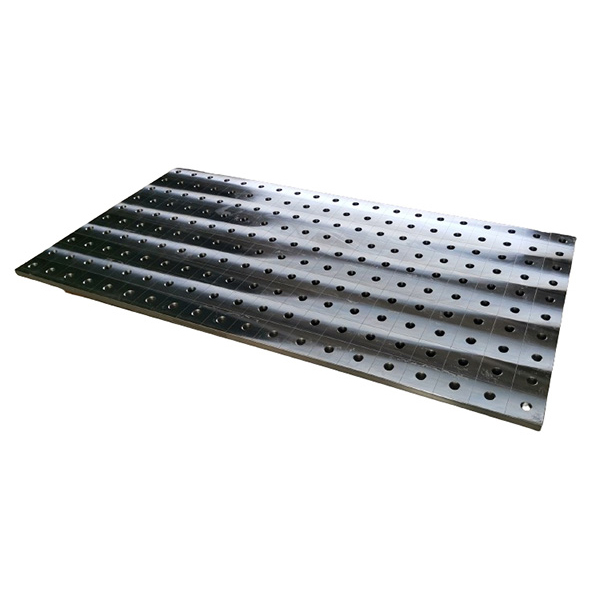
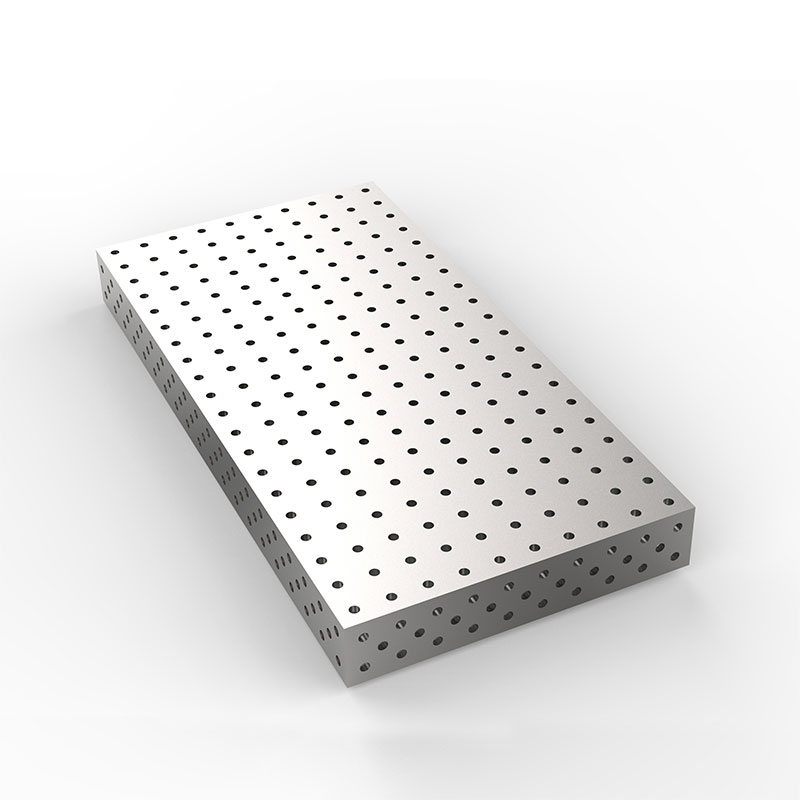
A tridimensia fleksebla okangula platformo rilatas al strukturo kun ok flankoj, elmontranta flekseblecon kaj funkciigante en tridimensia spaco. Male al rigidaj okangulaj strukturoj, ĉi tiuj platformoj povas adaptiĝi al diversaj kondiĉoj kaj terenoj, igante ilin taŭgaj por diversaj aplikoj postulantaj alĝustigeblecon kaj stabilecon. La fleksebleco povas esti atingita per diversaj dezajnelementoj, inkluzive de ĉarniroj, flekseblaj materialoj aŭ obeemaj mekanismoj.
Dezajnaj Konsideroj por Tri-Dimensiaj Flekseblaj Okangulaj Platformoj
Materiala Elekto
La elekto de materialo signife influas la flekseblecon, forton kaj fortikecon de la platformo. Oftaj materialoj inkludas alt-fortajn alojojn, kunmetaĵojn, kaj progresintajn polimerojn. La elekto dependas de la specifaj aplikaj postuloj, inkluzive de ŝarĝo-porta kapablo, mediaj kondiĉoj kaj dezirata nivelo de fleksebleco. Ekzemple, platformo dizajnita por alt-ŝarĝaj aplikoj eble postulos pli fortan materialon kiel ŝtalo, dum platformo por delikata instrumentado eble utiligos pli flekseblan polimeron.
Mekanisma Dezajno
La fleksebleco de la tridimensia fleksebla okangula platformo estas ofte atingita per la enkadrigo de ĉarniroj, obeemaj mekanismoj, aŭ flekseblaj juntoj. Tiuj mekanismoj permesas al la platformo adaptiĝi al malebenaj surfacoj aŭ alĝustigi ĝian orientiĝon. La dezajno de ĉi tiuj mekanismoj estas kritika por determini la gamon de moviĝo de la platformo, stabileco kaj totala efikeco. Konsideru faktorojn kiel la ĉarniro tipo, materialo kaj lokigo por optimumaj rezultoj. Malsamaj ĉarnirdezajnoj permesas ŝanĝiĝantajn gradojn da libereco kaj rigideco.
Aktuado kaj Kontrolo
Depende de la celita apliko, la platformo povas postuli funkciigajn mekanismojn por kontroli sian formon kaj orientiĝon. Tiuj mekanismoj povas intervali de simplaj manaj alĝustigoj ĝis kompleksaj robotsistemoj. Precizaj kontrolsistemoj estas esencaj por certigi, ke la platformo konservas stabilecon kaj precizecon en diversaj kondiĉoj. Ekzemple, aplikoj postulantaj precizan poziciigon eble utiligos servomotorojn kaj sofistikajn kontrolalgoritmojn.
Aplikoj de Tri-Dimensiaj Flekseblaj Okangulaj Platformoj
Tridimensiaj flekseblaj okangulaj platformoj trovi aplikojn en diversaj kampoj. Ilia kapablo adaptiĝi al malebenaj surfacoj kaj konservi stabilecon igas ilin taŭgaj por:
- Robotiko: Poŝtelefonaj robotbazoj, manipuliloj kun adaptaj kroĉaj kapabloj.
- Aerospaco: Deplojeblaj strukturoj, antenplatformoj kaj flekseblaj sunpaneloj.
- Biomedicina inĝenierado: Kirurgiaj iloj, minimume enpenetraj aparatoj.
- Konstruinĝenieristiko: Adapta skafaldaro, pontkonstruado.
Elektante la Ĝustan Tri-Dimensia Fleksebla Okangula Platformo
Elektante la taŭgan tridimensia fleksebla okangula platformo postulas zorgeman konsideron de pluraj faktoroj: celita apliko, postulata ŝarĝkapablo, dezirata fleksebleco, mediaj kondiĉoj kaj buĝeto. Labori kun spertaj inĝenieroj kaj fabrikistoj estas decida por certigi platformon kiu plenumas specifajn postulojn.
Fabrikistoj de Tri-Dimensiaj Flekseblaj Okangulaj Platformoj
Dum specifaj fabrikantoj de kutimo desegnita tridimensiaj flekseblaj okangulaj platformoj ne estas facile listigitaj publike pro la laŭmenda naturo de ĉi tiuj aĵoj, kompanioj specialigitaj pri precizeca inĝenierado kaj laŭmenda metala fabrikado ofte plenumas ĉi tiujn bezonojn. Por fortikaj kaj agordeblaj metalaj solvoj, konsideru esplori kompaniojn kiel Botou Haijun Metal Products Co., Ltd., kiuj ofertas kompetentecon en la dezajno kaj fabrikado de kompleksaj metalstrukturoj.
Plia Esplorado kaj Evoluo
Daŭrantaj esplor- kaj disvolvaj klopodoj daŭre plibonigas la dezajnon, materialojn kaj kapablojn de tridimensiaj flekseblaj okangulaj platformoj. Esplorado de progresoj en materiala scienco, agado-mekanismoj kaj kontrolsistemoj verŝajne kondukos al eĉ pli multflankaj kaj fortikaj dezajnoj en la estonteco.
| Karakterizaĵo | Avantaĝo | Malavantaĝo |
| Fleksebleco | Adaptebleco al malebenaj surfacoj | Potencialo por malstabileco |
| Okangula Formo | Stabileco kaj ŝarĝo-distribuo | Dezajna komplekseco |
| 3D Operacio | Verstileco en aplikoj | Pliigitaj defioj pri dezajno kaj kontrolo |
Malgarantio: Ĉi tiu artikolo provizas ĝeneralajn informojn kaj ne devus esti konsiderata profesia inĝenieristika konsilo. Ĉiam konsultu kun kvalifikitaj profesiuloj por specifaj postuloj pri dezajno kaj aplikaĵo.